1。完成了全場(chǎng)景的路徑搜索算法,這個(gè)算法比較復(fù)雜,不同于普通的A*算法,我采用的兩次搜索,首先是地形矩陣壓縮路徑的粗搜索,然后是相鄰tile塊之間的細(xì)節(jié)分布式搜索的方式,也就是壓縮路徑搜索出來的是細(xì)節(jié)搜索的向?qū)В@樣可以實(shí)現(xiàn)路徑的動(dòng)態(tài)搜索,而且路徑查找基本是個(gè)常量,超大地形搜索也不是問題。
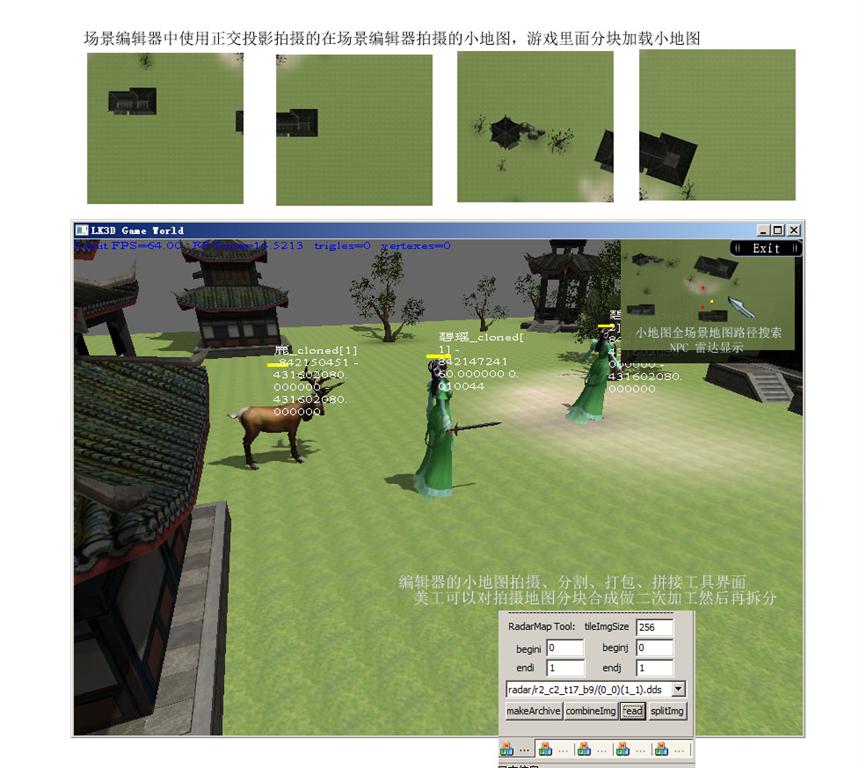
2。完成了全場(chǎng)景小地圖編輯器的功能,小地圖能子在場(chǎng)景編輯器中按tile進(jìn)行正交投影的自動(dòng)拍攝,拍攝輸出的圖片能進(jìn)行局部的拼合與拆分,還有打包,這充分考慮到美工對(duì)小地圖進(jìn)行二次編輯美化的需要
3。把全場(chǎng)景搜索功能和小地圖進(jìn)行了整合,鼠標(biāo)點(diǎn)擊場(chǎng)景或小地圖均能實(shí)現(xiàn)自動(dòng)尋路徑
4。月末開始進(jìn)行腳本引擎的接入,之前有研究過LUA,但由于種種原因最終確認(rèn)選擇了 C++ boost.python 導(dǎo)出的方式調(diào)用腳本,已經(jīng)實(shí)現(xiàn)了stl<實(shí)體> 容器和python腳本之間的自由調(diào)用和通訊模塊,接下來,開始整合一部分FSM有限狀態(tài)機(jī)的模塊,第一個(gè)切入點(diǎn)就是人物的攻擊移動(dòng)等等所有動(dòng)作相應(yīng)模塊,準(zhǔn)備寫個(gè)人物動(dòng)作調(diào)用的腳本,融入狀態(tài)機(jī)模式,讓這個(gè)膠水模塊充分發(fā)揮它的威力。