Posted on 2022-02-25 09:27
eryar 閱讀(1766)
評論(0) 編輯 收藏 引用 所屬分類:
2.OpenCASCADE

OpenCASCADE 布爾運算簡介
eryar@163.com
布爾運算(Boolean Operations)是根據(jù)兩組模型的組合創(chuàng)建出新的模型的造型方法�����。兩組模型Objects/Tools之間有三種布爾算子:
- 布爾并:FUSE,將兩組模型合并成一個;
- 布爾減:CUT���,從Objects中減去Tools模型;
- 布爾交:COMMON,即兩組模型的共有部分�����;
布爾運算的輸入是兩組模型��,分別叫Objects和Tools���。因為兩個參數(shù)的前后順序容易混淆��,借用機械加工類比來加深記憶:Objects類比為待加工的工件,Tools類比為機床刀具。當執(zhí)行布爾減運算時,相當于工件Object被刀具Tool切割。
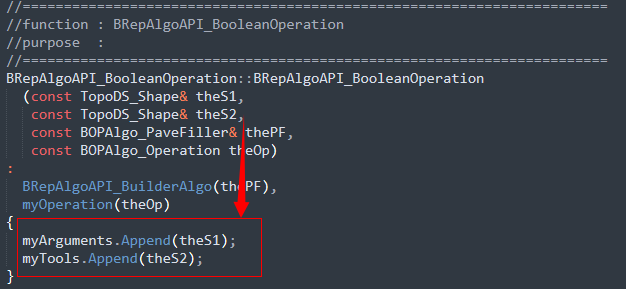
在OpenCASCADE中布爾運算第一個參數(shù)Objects也叫Arguments��,第二個參數(shù)也是Tools�����。對應源碼如下:
布爾運算的大概流程是先對兩個模型進行求交計算���,求交結果主要是Edge邊���。然后再根據(jù)求交計算新得到的Edge邊進行定位分類Classification處理��,排除不需要的Edge邊,面等。最后根據(jù)邊重構出新的BREP模型���。
布爾運算的健壯性及效率依賴一些底層算法,如求交算法Intersection Algorithm,投影算法Projection Algorithm,擬合算法Approximation Algorithm及定位算法Classification Algorithm等。求交算法主要有面面求交��、面邊求交�����、邊邊求交等��。投影和擬合算法主要用于計算邊在面中的P-Curves。定位算法主要用于重構階段,通過定位排除不需要的邊��、面等��。
關于重構模型OpenCASCADE提供了一些算法���,如通過使用函數(shù)BOPAlgo_Tools::EdgesToWires 和 BOPAlgo_Tools::WiresToFaces從線框模型生成面��。
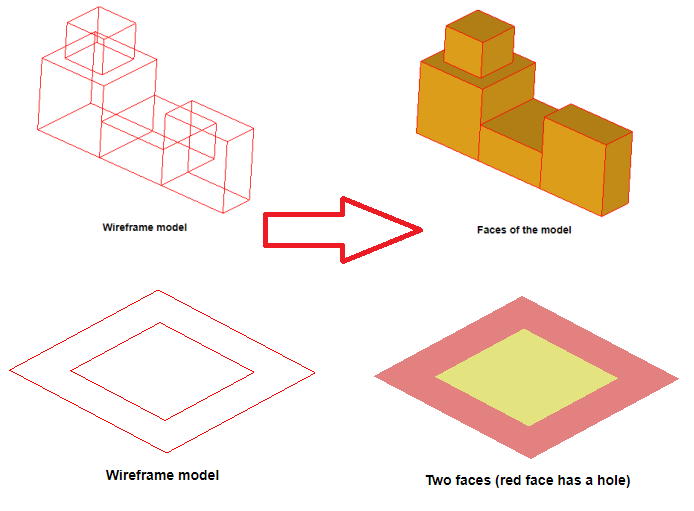
關于定位算法,提供BOPTools_AlgoTools::ComputeState計算點���、邊、面相對于其他模型的位置狀態(tài)。提供BOPTools_AlgoTools::IsHole來判斷面FACE上的環(huán)WIRE是不是孔。
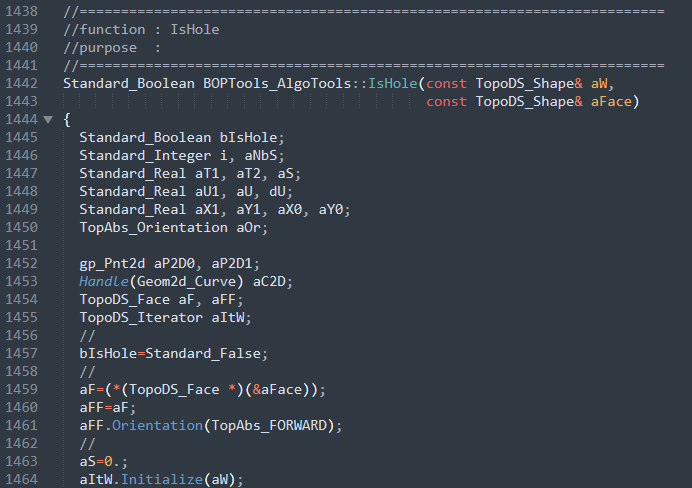
通過查看源碼,可以看到其實現(xiàn)原理:即根據(jù)環(huán)WIRE中的邊EDGE的PCurve是順時針還是逆時針來判斷��。通過對PCurve采樣點得到一個多邊形��,通過計算多邊形面積的正負來判斷。
OpenCASCADE中關于布爾運算有詳細的文檔Boolean Operations Specification�����,若對布爾運算感興趣���,可以結合源碼來看這些文檔�����。開源的好處是可以了解算法背后的實現(xiàn)原理��,如果有更好的方法,還可以參與貢獻�����,讓其變得更好���。