新建網(wǎng)頁 1
一般來說,多邊形是由頂點(diǎn)和邊構(gòu)成的平面物體。
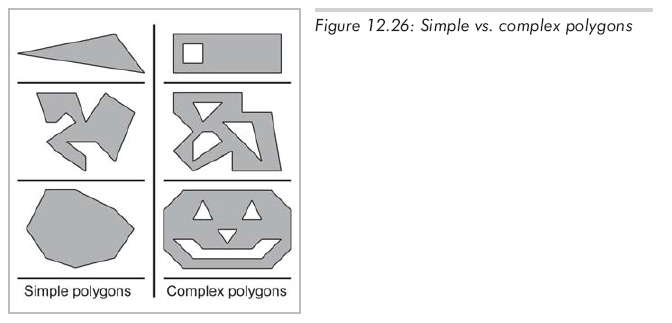
簡(jiǎn)單多邊形與復(fù)雜多邊形
簡(jiǎn)單多邊形不包含"洞",復(fù)雜多邊形可能包含"洞"(圖12.26)。簡(jiǎn)單多邊形可以通過沿多邊形列出的所有頂點(diǎn)來描述(左手坐標(biāo)系中,通常以從多邊形正面看時(shí)的順時(shí)針方向列出所有點(diǎn))。簡(jiǎn)單多邊形的使用頻率比復(fù)雜多邊形高得多。
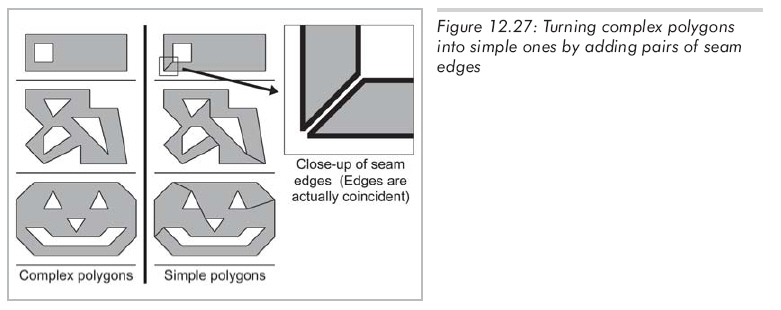
通過添加一對(duì)"接縫"邊,能將任意復(fù)雜多邊形轉(zhuǎn)化成簡(jiǎn)單多邊形,如圖12.27所示。見右邊的放大圖,我們?cè)诿總€(gè)"縫"添加了兩個(gè)邊,這兩個(gè)邊實(shí)際上是重合的,放大圖中將其分開是為了讓你看得更清楚。當(dāng)我們考慮到繞多邊形的邊的順序時(shí),這兩個(gè)接縫邊的方向是相反的。
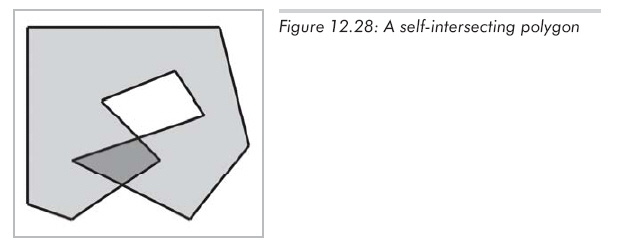
自相交多邊形
大多數(shù)簡(jiǎn)單多邊形的邊不相交,如果有的邊相交了,那么這個(gè)多邊形叫做自相交多邊形。一個(gè)簡(jiǎn)單的自相交多邊形如圖12.28所示。
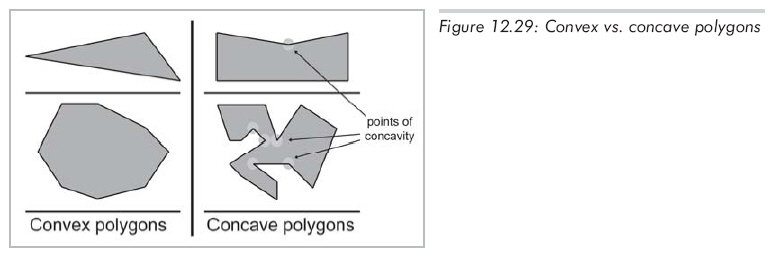
凸多邊形與凹多邊形
非自相交多邊形能進(jìn)一步細(xì)分為凸多邊形和凹多邊形。給凸多邊形下一個(gè)精確定義是一件非常困難的事,因?yàn)榇嬖诤芏嗔钊思值耐嘶问健?duì)大多數(shù)多邊形,下列常用的定義是等價(jià)的。不過對(duì)于一些退化多邊形來說,根據(jù)一種定義它是凸的,而根據(jù)另一種定義它又可能是凹的。
(1)直觀上,凸多邊形是沒有任何"凹陷處"的,而凹多邊形至少有一個(gè)頂點(diǎn)處于"凹陷處"----凹點(diǎn)。
(2)凸多邊形,任意兩頂點(diǎn)的連線都包含在多邊形中。但在凹多邊形中,總能找到一對(duì)頂點(diǎn),它們的連線有一部分在多邊形外。
(3)沿凸多邊形周邊移動(dòng)時(shí),在每個(gè)頂點(diǎn)的轉(zhuǎn)向都是相同的。對(duì)凹多邊形,一些是向右轉(zhuǎn),一些是向左轉(zhuǎn),在凹點(diǎn)的轉(zhuǎn)向是相反的(注意這僅是對(duì)非自相交多邊形來說的)。
前面曾提到過,退化多邊形會(huì)使這些相對(duì)清晰的定義變得模糊不清。例如一些多邊形有兩個(gè)連續(xù)的頂點(diǎn)重合,或這一條邊以相反的方向重復(fù)了兩次。能認(rèn)為這些多邊形是凸的嗎?實(shí)踐中,經(jīng)常用到下列凸性的定義:
(1)如果只能對(duì)凸多邊形起作用的代碼對(duì)這個(gè)多邊形也能起作用,那么它就是凸的(也就是說如果一個(gè)定義沒有被打破就不用修正它)。
(2)如果凸性測(cè)試算法判斷它是凸的,那么它就是凸的(這是由"算法定義"解釋的)。
現(xiàn)在,讓我們忽略一些病態(tài)情況,給出一些大家意見都一致的凸、凹多邊形。如圖12.29所示,右上角的凹多邊形有1個(gè)凹點(diǎn),而下面的凹多邊形有5個(gè)凹點(diǎn)。
任意凹多邊形都能分解為凸多邊形片,它的基本思路是定位凹點(diǎn)并通過添加對(duì)角線來有系統(tǒng)地移除它們。
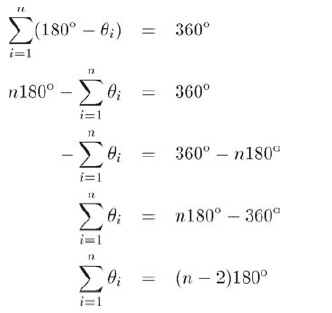
怎樣才能知道一個(gè)多邊形是凸的還是凹的?一種方法是檢查各頂點(diǎn)的內(nèi)角和,考慮n個(gè)頂點(diǎn)的凸多邊形,它的內(nèi)角和為(n-2)180。,有兩種方法可以證明這個(gè)結(jié)論。
(1)設(shè)θi為頂點(diǎn)i的內(nèi)角,很明顯,θi≤ 180。(假設(shè)多邊形是凸的)。在每個(gè)頂點(diǎn)上,補(bǔ)角為(180-θi)。,對(duì)于一個(gè)封閉的凸多邊形,全部頂點(diǎn)的補(bǔ)角之和為360。,有:
(2)任意n個(gè)頂點(diǎn)的凸多邊形都能分解為n-2個(gè)三角形,由經(jīng)典幾何知識(shí)可知,三角形內(nèi)角和為180。。所有三角形的內(nèi)角和為(n-2)180。,可以看到,這個(gè)和總是等于多邊形的內(nèi)角和。
不幸的是,凹多邊形和凸多邊形一樣,內(nèi)角和也是(n-2)180。。怎樣才能進(jìn)一步判斷一個(gè)多邊形是不是凸多邊形呢?對(duì)一個(gè)凸多邊形,內(nèi)角不會(huì)大于外角。(外角不是補(bǔ)角,一對(duì)內(nèi)角外角的和等于360。)
所以,將每個(gè)頂點(diǎn)處較小的角(內(nèi)角或外角)相加,凸多邊形得到(n-2)180。,凹多邊形則小于它。怎樣判斷哪個(gè)角較小呢?幸運(yùn)的是,有這樣一個(gè)工具 ---- 點(diǎn)乘,這種方法返回的角總是以較短的弧度來度量的。
下面的代碼說明了怎樣用角度和來判斷多邊形是否為凸多邊形。
Listing 12.4: 3D polygon convexity test using angle sum
// Function to determine if a polygon is convex. The polygon is
// assumed to be planar.
//
// Input:
// n Number of vertices
// vl pointer to array of of vertices
bool isConvex(int n, const Vector3 vl[])
{
// Initialize sum to 0 radians
float angleSum = 0.0f;
// Go around the polygon and sum the angle at each vertex
for (int i = 0 ; i < n ; ++i)
{
// Get edge vectors. We have to be careful on
// the first and last vertices. Also, note that
// this could be optimized considerably…
Vector3 e1;
if (i == 0)
e1 = vl[n–1] – vl[i];
else
e1 = vl[i–1] – vl[i];
Vector3 e2;
if (i == n–1)
e2 = vl[0] – vl[i];
else
e2 = vl[i+1] – vl[i];
// Normalize and compute dot product
e1.normalize();
e2.normalize();
float dot = e1 * e2;
// Compute smaller angle using “safe” function that protects
// against range errors which could be caused by numerical imprecision
float theta = safeAcos(dot);
// Sum it up
angleSum += theta;
}
// Figure out what the sum of the angles should be, assuming
// we are convex. Remember that pi/2 rad = 180 degrees
float convexAngleSum = (float)(n – 2) * kPiOverTwo;
// Now, check if the sum of the angles is less than it should be;
// then we’re concave. We give a slight tolerance for numerical imprecision
if (angleSum < convexAngleSum – (float)n * 0.0001f)
{
// We’re concave
return false;
}
// We’re convex, within tolerance
return true;
}
另一種檢測(cè)凸性的方法是檢測(cè)多邊形上是否有凹點(diǎn),如果一個(gè)都沒有找到,就是凸多邊形。它的基本想法是每個(gè)頂點(diǎn)的轉(zhuǎn)向應(yīng)該一致,任何轉(zhuǎn)向不一致的點(diǎn)都是凹點(diǎn)。
怎樣檢測(cè)一個(gè)點(diǎn)的轉(zhuǎn)向呢?技巧是利用邊向量的叉乘,左手坐標(biāo)系中,如果向量的轉(zhuǎn)向是順指針,它們的叉乘就會(huì)指向你。什么是指向你呢?我們從多邊形的正面看,正面由法向量指明。如果沒有提供法向量,就必須做一些計(jì)算來得到。一旦有了法向量,檢查多邊形的每個(gè)頂點(diǎn)。用相鄰的兩個(gè)邊向量計(jì)算該頂點(diǎn)的法向量,接著用多邊形的法向量和頂點(diǎn)的法向量點(diǎn)乘,檢測(cè)它們的方向是否相反。如果是(點(diǎn)乘為負(fù)),那么這個(gè)頂點(diǎn)就是一個(gè)凹點(diǎn)。
三角分解和扇形分解
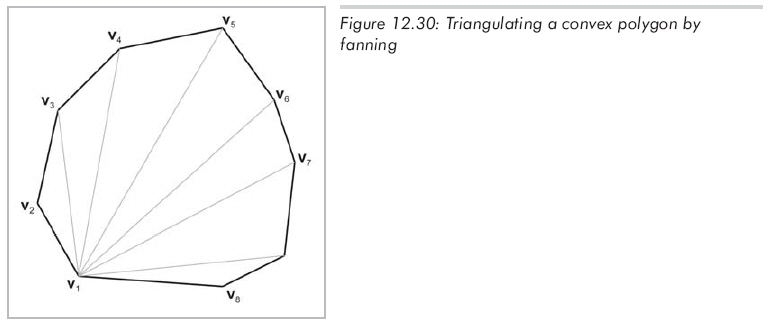
任意多邊形都能分解為三角形。因此,所有對(duì)三角形的操作都能應(yīng)用到多邊形上。復(fù)雜、自相交、甚至簡(jiǎn)單的凹多邊形的三角分解都不是一件簡(jiǎn)單的工作。幸運(yùn)的是,簡(jiǎn)單多邊形的三角分解是一件容易的事。一種顯而易見的三角分解技術(shù)是選取一個(gè)點(diǎn)(稱作第一個(gè)點(diǎn)),沿著頂點(diǎn)按"扇形"分解多邊形。給定一個(gè)有n個(gè)頂點(diǎn)的多邊形,沿多邊形列頂點(diǎn)v1...vn,能夠很容易地構(gòu)造形如{v1,vi-1, vi}的n-2個(gè)三角形,見圖12.30。
扇形三角分割會(huì)分割出一些長的、較細(xì)的三角形,這在某些情況下會(huì)引起麻煩。如同計(jì)算表面的法向量一樣,數(shù)值的不精確性在度量極小的角時(shí)會(huì)造成一些問題。
一種更加"聰明"的分解方法是:連接兩頂點(diǎn)的對(duì)角線將一個(gè)多邊形分解為兩部分。這時(shí),對(duì)角線端點(diǎn)處的兩個(gè)內(nèi)角都能分解為兩個(gè)新的內(nèi)角。因此,總共產(chǎn)生了4個(gè)新內(nèi)角。為了分解多邊形,選擇能使這4個(gè)新內(nèi)角中最小的角最大化的對(duì)角線,用這條對(duì)角線將多邊形分為兩個(gè)。對(duì)分割后的每一部分都遞歸應(yīng)用這個(gè)過程直到剩下的都是三角形。
這個(gè)方法產(chǎn)生較少的細(xì)三角形,但在實(shí)踐中,它過于復(fù)雜。根據(jù)幾何學(xué)和應(yīng)用目的,扇形分解已經(jīng)足夠了(并且簡(jiǎn)單得多)。