HTML clipboard
四元數(shù)記法
一個(gè)四元數(shù)包含一個(gè)標(biāo)量和一個(gè)3D向量分量,經(jīng)常記標(biāo)量分量為w,記向量分量為單一的 v 或分開的x、y、z。兩種記法分別如下:
[w v ]
[w, (x, y, z)]
在某些情況下,用 v 這樣的短記法更方便,但在另一些情況下,"擴(kuò)展"的記法會(huì)更清楚。
也可以將四元數(shù)豎著寫,有時(shí)這會(huì)使等式的格式一目了然,"行"或"列"四元數(shù)沒有明顯的區(qū)別。
四元數(shù)和復(fù)數(shù)
復(fù)數(shù)對(duì)(a, b)定義了數(shù)a+bi,i是所謂的虛數(shù),滿足i2 = -1:a稱作實(shí)部,b稱作虛部。任意實(shí)數(shù)k都能表示為復(fù)數(shù)(k,
0)=k + 0i。
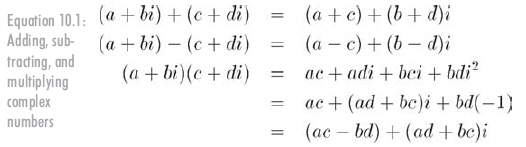
復(fù)數(shù)能夠相加、相減、相乘,如公式10.1所示:
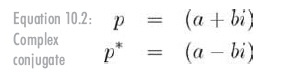
通過(guò)使虛部變負(fù),還能夠計(jì)算復(fù)數(shù)的共軛,記法如公式10.2:
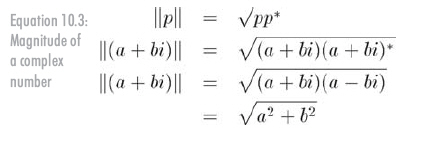
還能夠計(jì)算復(fù)數(shù)的模。這個(gè)運(yùn)算的記法和解釋與實(shí)數(shù)的絕對(duì)值類似,實(shí)際上,如果將實(shí)數(shù)表示成復(fù)數(shù),它們將產(chǎn)生相同的結(jié)果。公式10.3是計(jì)算復(fù)數(shù)大小的公式:
復(fù)數(shù)集存在于一個(gè)2D平面上,可以認(rèn)為這個(gè)平面有兩個(gè)軸:實(shí)軸和虛軸。這樣,就能將復(fù)數(shù)(x,
y)解釋為2D向量。用這種方法解釋復(fù)數(shù)時(shí),它們能用來(lái)表達(dá)平面中的旋轉(zhuǎn)。看看復(fù)數(shù)p繞原點(diǎn)旋轉(zhuǎn)角度θ的情況,如圖10.9所示:
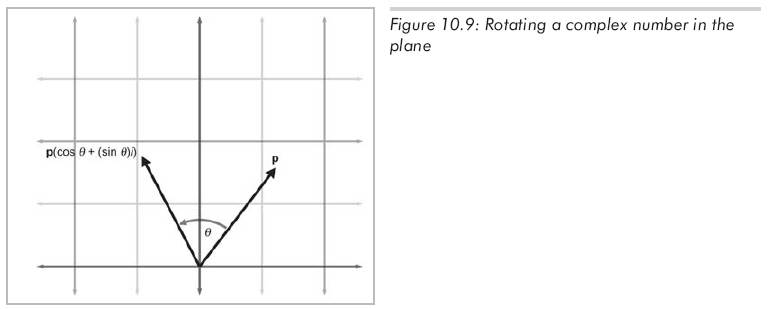
為進(jìn)行這個(gè)旋轉(zhuǎn),引入第二個(gè)復(fù)數(shù) q = (cosθ, sinθ)。現(xiàn)在,旋轉(zhuǎn)后的復(fù)數(shù)p'能用復(fù)數(shù)乘法計(jì)算出來(lái):
p = x + yi
q = cosθ + i sinθ
p' = pq = (x + yi)(cosθ + i sinθ) = (xcosθ - ysinθ) + (xsinθ + ycosθ)i
引入復(fù)數(shù)q和用2x2旋轉(zhuǎn)矩陣達(dá)到的效果是一樣的,但復(fù)數(shù)提供了另一種有趣的記法。
四元數(shù)擴(kuò)展了復(fù)數(shù)系統(tǒng),它使用三個(gè)虛部i, j, k。它們的關(guān)系如下:
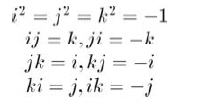
一個(gè)四元數(shù)[w, (x, y, z)]定義了復(fù)數(shù)
w+xi+yj+zk,很多標(biāo)準(zhǔn)復(fù)數(shù)的性質(zhì)都能應(yīng)用到四元數(shù)上。更重要的是,和復(fù)數(shù)能用來(lái)旋轉(zhuǎn)2D中的向量類似,四元數(shù)也能用來(lái)旋轉(zhuǎn)3D中的向量。
四元數(shù)和軸-角對(duì)
歐拉證明了一個(gè)旋轉(zhuǎn)序列等價(jià)于單個(gè)旋轉(zhuǎn)。因此,3D中的任意角位移都能表示為繞單一軸的單一旋轉(zhuǎn)(這里的軸是一般意義上的旋轉(zhuǎn)軸,不要和笛卡爾坐標(biāo)軸混淆。顯然,旋轉(zhuǎn)軸的方向是任意的)。當(dāng)一個(gè)方位用這種形式來(lái)描述時(shí)稱作軸-角描述法(實(shí)際上,能將軸-角形式作為描述方位的第四種表達(dá)方式。但是,軸-角對(duì)很少用到,經(jīng)常被歐拉角或四元數(shù)替代)。
設(shè) n 為旋轉(zhuǎn)軸,對(duì)于旋轉(zhuǎn)軸來(lái)說(shuō)長(zhǎng)度并不重要,將 n 定義為單位長(zhǎng)度會(huì)比較方便。根據(jù)左手或右手法則, n 的方向定義了哪邊將被認(rèn)為是旋轉(zhuǎn)"正"方向。設(shè)θ為繞軸旋轉(zhuǎn)的量,因此,軸-角對(duì)( n ,
θ)定義了一個(gè)角位移:繞 n 指定的軸旋轉(zhuǎn)θ角。
四元數(shù)能被解釋為角位移的軸-角對(duì)方式。然而, n 和θ不是直接存儲(chǔ)在四元數(shù)的四個(gè)數(shù)中,它們的確在四元數(shù)里,但不是那么直接。公式10.4列出了四元數(shù)中的數(shù)和 n ,θ的關(guān)系,兩種四元數(shù)加法都被使用了。

記住, q 的w分量和θ有關(guān)系,但它們不是一回事。同樣, v 和 n 也有關(guān)系但不完全相同。
負(fù)四元數(shù)
四元數(shù)能求負(fù),做法很直接,將每個(gè)分量對(duì)變負(fù),見公式10.5:
- q = -[w (x y z)] = [-w (-x -y -z)] = -[w v ]
= [-w - v ]
公式10.5 四元數(shù)求負(fù)
q 和- q 代表的實(shí)際角位移是相同的,很奇怪吧!如果我們將θ加上360度的倍數(shù),不會(huì)改變 q 代表的角位移,但它使 q 的四個(gè)分量都變負(fù)了。因此,3D中的任意角位移都有兩種不同的四元數(shù)表示方法,它們互相為負(fù)。
單位四元數(shù)
幾何上,存在兩個(gè)"單位"四元數(shù),它們代表沒有角位移,[1, 0 ]和[-1, 0 ](注意粗體 0 ,它們代表零向量)。當(dāng)θ是360度的偶數(shù)倍時(shí),有第一種形式,cos(θ/2)=1;θ是360度的奇數(shù)倍時(shí),cos( θ /2)=-1。在兩種情況下,都有sin(θ/2)=0,所以 n 的值無(wú)關(guān)緊要。它的意義在于:
當(dāng)旋轉(zhuǎn)角θ是360度的整數(shù)倍時(shí),方位并沒有改變,并且旋轉(zhuǎn)軸也是無(wú)關(guān)緊要的。
數(shù)學(xué)上,實(shí)際只有一個(gè)單位四元數(shù):[1, 0 ]。用任意四元數(shù) q 乘以單位四元數(shù)[1,
0 ],結(jié)果仍是 q 。任意四元數(shù) q 乘以另一個(gè)"幾何單位"[-1,
0 ]時(shí)得到- q 。幾何上,因?yàn)?strong> q 和- q 代表的角位移相同,可認(rèn)為結(jié)果是相同的。但在數(shù)學(xué)上, q 和- q 不相等,所以[-1,
0 ]并不是"真正"的單位四元數(shù)。
四元數(shù)的模
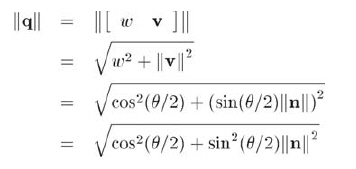
和復(fù)數(shù)一樣,四元數(shù)也有模。記法和公式都和向量類似,如公式10.6所示:

讓我們看看它的幾何意義,代入 θ 和 n ,可得到:
n 為單位向量,所以:
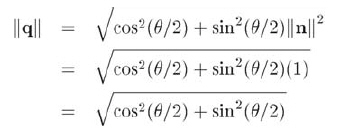
應(yīng)用三角公式sin2x + cos2x = 1,得到:
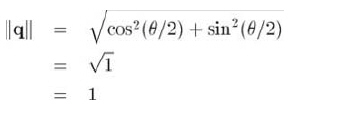
如果為了用四元數(shù)來(lái)表示方位,我們僅使用符合這個(gè)規(guī)則的單位四元數(shù)。
四元數(shù)共軛和逆
四元數(shù)的共軛記作 q *,可通過(guò)讓四元數(shù)的向量部分變負(fù)來(lái)獲得,見公式10.7:

四元數(shù)的逆記作 q ^-1,定義為四元數(shù)的共軛除以它的模,見公式10.8:
四元數(shù)的逆和實(shí)數(shù)的倒數(shù)有著有趣的對(duì)應(yīng)關(guān)系。對(duì)于實(shí)數(shù)a,它的逆a-1為1/a,從另一方面說(shuō),aa-1 = a-1a
= 1。四元數(shù)的逆也有著同樣的性質(zhì),一個(gè)四元數(shù) q 乘以它的逆 q -1,即可得到單位四元數(shù)[1,
0 ]。
公式10.8是四元數(shù)逆的正式定義,但我們只使用單位四元數(shù),所以四元數(shù)的逆和共軛是相等的。
共軛非常有趣,因?yàn)?strong> q 和 q *代表相反的角位移。很容易驗(yàn)證這種說(shuō)法,使 v 變負(fù),也就是使旋轉(zhuǎn)軸反向,它顛倒了我們所認(rèn)為的旋轉(zhuǎn)正方向。因此, q 繞軸旋轉(zhuǎn)θ角,而 q *沿相反的方向旋轉(zhuǎn)相同的角度。