在這里,
Ct
指遍歷整個節點包含的三角形遍歷時間,也就是渲染這一簇三角形的時間;
Cl
指
Split
Plane“
左邊”的三角形遍歷時間,同理
Cr
是“右邊”的遍歷時間。引用的一些資料認為,
事實上,
Cost(x)
是兩個單調函數
Cl(x)
、
Cr(x)
的線性疊加。我們要盡量找到
Cost(x)
最小的某個空間位置,或者是某一個三角形邊界,進而分割場景三角形。
顯然,這肯定由三步組成:
1、選擇合適的
Split
Plane
,可以有三個維度,并且可以容易推斷總共有
2n
個
2、數數看左邊有多少個
AABBs
3、數數看右邊有多少個
AABBs
下面我們開始討論
2
種方法:排序與掃描。
Sort
排序
排序很容易理解。沿著軸將所有三角形的
AABB
排序(也就是對三角形索引數組進行排序)。排序后就可以直接把想要得位置和三角形數目帶入公式計算,如果繪制為函數圖像可以獲得最光滑連續的圖形。總花費為
O(nlogn)
。
Scan
掃描
掃描有些羅嗦,不過也很容易實現,最重要的是目前已經有成功的應用
[4]
。指定場景中的一個平面,遍歷三角形比較大小,記錄落在左邊和右邊的數目,再帶入公式。如果要獲得多個
Cost
數值,就必須要選擇多個位置進行計算。每次都要遍歷全部的三角形。經過處理后也可以達到
O(nlogn)
的復雜度,不過結合了采樣技術后可以獲得近似準確的結果,而且花費小的多。而且,這個過程是可以使用
SIMD
加速的。
還有一些技巧和疑問
[3]
:
1、是否總是計算三個軸中最小的那個位置,還是總是從一個軸計算?
2、樹需要細分到何種程度?每個
Leaf
需要有多少個三角形?
現在我們可以做進一步的推測,如果希望用光線跟蹤一個動態的場景,那么每當我們變換過矩陣后,都需要重新構造一次
kD
樹,所以為了達到實時交互式的速度,必須要對關鍵的步驟進行優化。而且生成樹的質量與遍歷的性能關系十分密切。
我們的思路有了,下面可以構思具體的實現過程
A.
準備三角形索引數組
Tris[]
。
B.
獲得整個場景的
AABB
V
,其中
V.min[0]
就是場景的左邊界,以此類推。
C.
通過三角形索引數組讀取
3
個頂點,構造每個三角形的
AABB
,儲存到一個容器中
vector<AABB>
AABBs
,同時記錄
AABB
究竟屬于哪個三角形。
D.
獲得三角形
AABBs
的數目
N
,如果大于一個數值比如
1024
就用步驟
FG
計算
3
次,否則只計算一次。獲得
AABBs
的開頭和末尾指針(迭代器)。
E.
如果選擇
Sort
,那么就要先對
AABBs
中的元素排序。這里我們采用
Scan
。
F.
在
(min[AXIS],max[AXIS])
之間找幾個固定平面,比如
8
個。
AXIS
指選擇的坐標軸。
H.
帶入公式計算,選擇
Cost
最小的
Split
Position
,生成
Node
。如果已經達到中止條件,那么就生成
Leaf
Node
,否則生成
Inner
Node
。把
v
從
Split
Position
分成兩個
Voxel
Vl
與
Vr
。把
AABBs
分割為兩個,從與
Split
Position
最近的三角形開始。
G.
遍歷
AABBs
容器,比較平面和每個元素的位置,記錄
8
對數據。
I.
帶入
Vl
與
Vr
分別從
D
開始迭代。
??? 下面是分隔這個模型的輸出信息:
TriNum?:?
16220
Left?Voxel?has?:?
12377
??Right?Voxel?has?:?
384
Left?Voxel?has?:?
2912
???Right?Voxel?has?:?
946
Left?Voxel?has?:?
1025
???Right?Voxel?has?:?
188
Left?Voxel?has?:?
415
????Right?Voxel?has?:?
610
Left?Voxel?has?:?
128
????Right?Voxel?has?:?
287
Left?Voxel?has?:?
68
?????Right?Voxel?has?:?
60
Leaf?LEVEL?:?
5
??Count?:?
128
Left?Voxel?has?:?
145
????Right?Voxel?has?:?
142
Left?Voxel?has?:?
77
?????Right?Voxel?has?:?
68
Leaf?LEVEL?:?
6
??Count?:?
145
Left?Voxel?has?:?
61
?????Right?Voxel?has?:?
81
Leaf?LEVEL?:?
6
??Count?:?
142
Left?Voxel?has?:?
218
????Right?Voxel?has?:?
392
Left?Voxel?has?:?
97
?????Right?Voxel?has?:?
121
Leaf?LEVEL?:?
5
??Count?:?
218
Left?Voxel?has?:?
211
????Right?Voxel?has?:?
181
Left?Voxel?has?:?
114
????Right?Voxel?has?:?
97
Leaf?LEVEL?:?
6
??Count?:?
211
Left?Voxel?has?:?
82
?????Right?Voxel?has?:?
99
Leaf?LEVEL?:?
6
??Count?:?
181
Left?Voxel?has?:?
772
????Right?Voxel?has?:?
111
Left?Voxel?has?:?
373
????Right?Voxel?has?:?
399
Left?Voxel?has?:?
194
????Right?Voxel?has?:?
179
Left?Voxel?has?:?
82
?????Right?Voxel?has?:?
112
Leaf?LEVEL?:?
6
??Count?:?
194
Left?Voxel?has?:?
111
????Right?Voxel?has?:?
68
Leaf?LEVEL?:?
6
??Count?:?
179
Left?Voxel?has?:?
190
????Right?Voxel?has?:?
209
Left?Voxel?has?:?
99
?????Right?Voxel?has?:?
91
Leaf?LEVEL?:?
6
??Count?:?
190
Left?Voxel?has?:?
63
?????Right?Voxel?has?:?
146
Left?Voxel?has?:?
516
????Right?Voxel?has?:?
599
Left?Voxel?has?:?
246
????Right?Voxel?has?:?
270
Left?Voxel?has?:?
124
????Right?Voxel?has?:?
122
Leaf?LEVEL?:?
6
??Count?:?
246
Left?Voxel?has?:?
126
????Right?Voxel?has?:?
144
Left?Voxel?has?:?
285
????Right?Voxel?has?:?
314
Left?Voxel?has?:?
150
????Right?Voxel?has?:?
135
Left?Voxel?has?:?
152
????Right?Voxel?has?:?
162
Left?Voxel?has?:?
4180
???Right?Voxel?has?:?
528
Left?Voxel?has?:?
2220
???Right?Voxel?has?:?
196
Left?Voxel?has?:?
1211
???Right?Voxel?has?:?
100
Left?Voxel?has?:?
502
????Right?Voxel?has?:?
709
Left?Voxel?has?:?
235
????Right?Voxel?has?:?
267
Left?Voxel?has?:?
343
????Right?Voxel?has?:?
366
Left?Voxel?has?:?
471
????Right?Voxel?has?:?
538
Left?Voxel?has?:?
201
????Right?Voxel?has?:?
270
Left?Voxel?has?:?
263
????Right?Voxel?has?:?
275
Left?Voxel?has?:?
924
????Right?Voxel?has?:?
103
Left?Voxel?has?:?
428
????Right?Voxel?has?:?
496
Left?Voxel?has?:?
184
????Right?Voxel?has?:?
244
Left?Voxel?has?:?
286
????Right?Voxel?has?:?
210
Left?Voxel?has?:?
440
????Right?Voxel?has?:?
596
Left?Voxel?has?:?
211
????Right?Voxel?has?:?
229
Left?Voxel?has?:?
310
????Right?Voxel?has?:?
286
Left?Voxel?has?:?
2437
???Right?Voxel?has?:?
284
Left?Voxel?has?:?
1228
???Right?Voxel?has?:?
120
Left?Voxel?has?:?
558
????Right?Voxel?has?:?
670
Left?Voxel?has?:?
303
????Right?Voxel?has?:?
255
Left?Voxel?has?:?
298
????Right?Voxel?has?:?
372
Left?Voxel?has?:?
578
????Right?Voxel?has?:?
631
Left?Voxel?has?:?
295
????Right?Voxel?has?:?
283
Left?Voxel?has?:?
302
????Right?Voxel?has?:?
329
Left?Voxel?has?:?
1466
???Right?Voxel?has?:?
138
Left?Voxel?has?:?
805
????Right?Voxel?has?:?
661
Left?Voxel?has?:?
430
????Right?Voxel?has?:?
375
Left?Voxel?has?:?
346
????Right?Voxel?has?:?
315
Left?Voxel?has?:?
653
????Right?Voxel?has?:?
729
Left?Voxel?has?:?
347
????Right?Voxel?has?:?
306
Left?Voxel?has?:?
367
????Right?Voxel?has?:?
362
Left?Voxel?has?:?
2319
???Right?Voxel?has?:?
152
Left?Voxel?has?:?
1413
???Right?Voxel?has?:?
906
Left?Voxel?has?:?
825
????Right?Voxel?has?:?
588
Left?Voxel?has?:?
437
????Right?Voxel?has?:?
388
Left?Voxel?has?:?
180
????Right?Voxel?has?:?
257
Left?Voxel?has?:?
98
?????Right?Voxel?has?:?
82
Leaf?LEVEL?:?
6
??Count?:?
180
Left?Voxel?has?:?
150
????Right?Voxel?has?:?
107
Left?Voxel?has?:?
191
????Right?Voxel?has?:?
197
Left?Voxel?has?:?
90
?????Right?Voxel?has?:?
101
Leaf?LEVEL?:?
6
??Count?:?
191
Left?Voxel?has?:?
68
?????Right?Voxel?has?:?
129
Left?Voxel?has?:?
294
????Right?Voxel?has?:?
294
Left?Voxel?has?:?
150
????Right?Voxel?has?:?
144
Left?Voxel?has?:?
91
?????Right?Voxel?has?:?
59
Leaf?LEVEL?:?
6
??Count?:?
150
Left?Voxel?has?:?
51
?????Right?Voxel?has?:?
93
Leaf?LEVEL?:?
6
??Count?:?
144
Left?Voxel?has?:?
153
????Right?Voxel?has?:?
141
Left?Voxel?has?:?
105
????Right?Voxel?has?:?
48
Leaf?LEVEL?:?
6
??Count?:?
153
Left?Voxel?has?:?
49
?????Right?Voxel?has?:?
92
Leaf?LEVEL?:?
6
??Count?:?
141
Left?Voxel?has?:?
457
????Right?Voxel?has?:?
449
Left?Voxel?has?:?
214
????Right?Voxel?has?:?
243
Left?Voxel?has?:?
124
????Right?Voxel?has?:?
90
Leaf?LEVEL?:?
5
??Count?:?
214
Left?Voxel?has?:?
102
????Right?Voxel?has?:?
141
Left?Voxel?has?:?
79
?????Right?Voxel?has?:?
62
Leaf?LEVEL?:?
6
??Count?:?
141
Left?Voxel?has?:?
196
????Right?Voxel?has?:?
253
Left?Voxel?has?:?
99
?????Right?Voxel?has?:?
97
Leaf?LEVEL?:?
5
??Count?:?
196
Left?Voxel?has?:?
133
????Right?Voxel?has?:?
120
Left?Voxel?has?:?
56
?????Right?Voxel?has?:?
77
Leaf?LEVEL?:?
6
??Count?:?
133
Left?Voxel?has?:?
791
????Right?Voxel?has?:?
733
Left?Voxel?has?:?
462
????Right?Voxel?has?:?
329
Left?Voxel?has?:?
228
????Right?Voxel?has?:?
234
Left?Voxel?has?:?
129
????Right?Voxel?has?:?
99
Left?Voxel?has?:?
64
?????Right?Voxel?has?:?
65
Leaf?LEVEL?:?
6
??Count?:?
129
Left?Voxel?has?:?
117
????Right?Voxel?has?:?
117
Leaf?LEVEL?:?
5
??Count?:?
234
Left?Voxel?has?:?
171
????Right?Voxel?has?:?
158
Left?Voxel?has?:?
90
?????Right?Voxel?has?:?
81
Leaf?LEVEL?:?
5
??Count?:?
171
Left?Voxel?has?:?
88
?????Right?Voxel?has?:?
70
Leaf?LEVEL?:?
5
??Count?:?
158
Left?Voxel?has?:?
423
????Right?Voxel?has?:?
310
Left?Voxel?has?:?
205
????Right?Voxel?has?:?
218
Left?Voxel?has?:?
114
????Right?Voxel?has?:?
91
Leaf?LEVEL?:?
5
??Count?:?
205
Left?Voxel?has?:?
112
????Right?Voxel?has?:?
106
Leaf?LEVEL?:?
5
??Count?:?
218
Left?Voxel?has?:?
177
????Right?Voxel?has?:?
133
Left?Voxel?has?:?
86
?????Right?Voxel?has?:?
91
Leaf?LEVEL?:?
5
??Count?:?
177
Left?Voxel?has?:?
77
?????Right?Voxel?has?:?
56
Leaf?LEVEL?:?
5
??Count?:?
133
其中,
C
可以用
foreach
,
H
可以用
partition
(
stable_partition
)等
STL
的算法。
核心的代碼如下:
void
?Count(AABB
*
?BeginItr,AABB
*
?EndItr,AXIS?Axis,
float
?SplitPos,
ulong
*
?Cl,
ulong
*
?Cr)
{
????
for
(?AABB
*
?itr?
=
?BeginItr?;?itr?
!=
?EndItr;?itr
++
?){
????????(
*
Cl)
+=
(?(itr
->
max[Axis]?
<
?SplitPos?)?
?
?
1
?:?
0
?);
????????(
*
Cr)
+=
(?(itr
->
min[Axis]?
>
?SplitPos?)?
?
?
1
?:?
0
?);
????}
};
inline?
bool
?Terminate(
ulong
?TriCount,
int
?Level)
{
????
if
?(?TriCount?
<
?
128
?
||
?Level?
>
?MAX_LEVEL){
????????
return
?
true
;
????}
????
return
?
false
;
};
inline?
bool
?IsUpboundSmaller(AABB
&
?AABB)
{
????
float
?half_width?
=
?(?AABB.max[::gSplitAxis]?
-
?AABB.min[::gSplitAxis]?)
*
0.5f
;
????
return
?(AABB.max[::gSplitAxis]?
-
?::gSplitPos)?
<
?half_width?
?
?
true
?:?
false
;
};
float
?SAHCost(AXIS?Axis,
ulong
*
?Cl,
ulong
*
?Cr,AABB
&
?V,
float
?SplitPos)
{
????
ulong
?Nl?
=
?
*
Cl;
????
ulong
?Nr?
=
?
*
Cr;
????
float
?Length?
=
?V.max[Axis]?
-
?V.min[Axis];
????
float
?L?
=
?SplitPos?
-
?V.min[Axis],R?
=
?SplitPos?
-
?V.max[Axis];
????
float
?Pl?
=
?L?
/
?Length;
????
float
?Pr?
=
?
1.0f
?
-
?Pl;
????
float
?Tt?
=
?TRAVERSAL_TIME;
????
float
?Til?
=
?Nl?
*
?INTERSECTION_TIME,Tir?
=
?Nr?
*
?INTERSECTION_TIME;
????
return
?Tt?
+
?Pl
*
Nl
*
Til?
+
?Pr
*
Nr
*
Tir;
};
void
?KDTreeBuild(KDNode
*
?Root,AABB?V,AABB
*
?BeginItr,AABB
*
?EndItr,AXIS?Axis,
int
?Level)
{
????
ulong
?TotalTriCount?
=
?EndItr?
-
?BeginItr;
????
if
(?Terminate(TotalTriCount,Level)?)
????????
return
;
????
float
?SplitLoc[
7
];
????
float
?Cost[
7
];
????
ulong
?Cl?
=
?
0
,Cr?
=
?
0
;
????
float
?MinLoc?
=
?V.min[Axis],MaxLoc?
=
?V.max[Axis];
????
float
?step?
=
?(MaxLoc?
-
?MinLoc)?
/
?
8.0f
;
????
for
(?
int
?i?
=
?
0
;i
<
7
?;i
++
?){
????????SplitLoc[i]?
=
?MinLoc?
+
?step?
*
?
float
(i
+
1
);
????????Count(BeginItr,EndItr,Axis,SplitLoc[i],
&
Cl,
&
Cr);
????????Cost[i]?
=
?SAHCost(Axis,
&
Cl,
&
Cr,V,SplitLoc[i]);
????????Cl?
=
?Cr?
=
?
0
;
????}
????
float
*
?pGoodCostPtr?
=
?min_element(Cost,Cost
+
7
);
????size_t?_Pos?
=
?pGoodCostPtr?
-
?Cost;
????::gSplitPos?
=
?SplitLoc[_Pos];
????::gSplitAxis?
=
?Axis;
????AABB
*
?MidItr?
=
?stable_partition(BeginItr,EndItr,IsUpboundSmaller);
????Cl?
=
?MidItr?
-
?BeginItr;
????Cr?
=
?EndItr?
-
?MidItr;
????cout
<<
"
Left?Voxel?has?:?
"
<<
Cl
<<
"
\tRight?Voxel?has?:?
"
<<
Cr
<<
endl;
????AABB?Vl,Vr;
????
if
?(?Cr?
>
?
128
?
||
?Cl?
>
?
128
?){
????????Root?
=
?
new
?KDNode;?
//
Root
????????Root
->
Left?
=
?
new
?KDNode;
????????Root
->
Right?
=
?
new
?KDNode;
????????Root
->
tag.SplitPos?
=
?::gSplitPos;
????????Root
->
Count?
=
?Axis;
//
Ulong.MaxSize?-?Axis?代表坐標?因為Left?Right肯定不是0
????????
switch
(Axis){
????????????
case
?X?:
????????????????Vl.min[
0
]?
=
?V.min[
0
];
????????????????Vl.min[
1
]?
=
?V.min[
1
];
????????????????Vl.min[
2
]?
=
?V.min[
2
];
????????????????Vl.max[
0
]?
=
?::gSplitPos;
????????????????Vl.max[
1
]?
=
?V.max[
1
];
????????????????Vl.max[
2
]?
=
?V.max[
2
];
????????????????Vr.min[
0
]?
=
?::gSplitPos;
????????????????Vr.min[
1
]?
=
?V.min[
1
];
????????????????Vr.min[
2
]?
=
?V.min[
2
];
????????????????Vr.max[
0
]?
=
?V.max[
0
];
????????????????Vr.max[
1
]?
=
?V.max[
1
];
????????????????Vr.max[
2
]?
=
?V.max[
2
];
????????????????
break
;
????????????
case
?Y?:
????????????????Vl.min[
0
]?
=
?V.min[
0
];
????????????????Vl.min[
1
]?
=
?V.min[
1
];
????????????????Vl.min[
2
]?
=
?V.min[
2
];
????????????????Vl.max[
0
]?
=
?V.max[
0
];
????????????????Vl.max[
1
]?
=
?::gSplitPos;
????????????????Vl.max[
2
]?
=
?V.max[
2
];
????????????????Vr.min[
0
]?
=
?V.min[
0
];
????????????????Vr.min[
1
]?
=
?::gSplitPos;
????????????????Vr.min[
2
]?
=
?V.min[
2
];
????????????????Vr.max[
0
]?
=
?V.max[
0
];
????????????????Vr.max[
1
]?
=
?V.max[
1
];
????????????????Vr.max[
2
]?
=
?V.max[
2
];
????????????????
break
;
????????????
case
?Z?:
????????????????Vl.min[
0
]?
=
?V.min[
0
];
????????????????Vl.min[
1
]?
=
?V.min[
1
];
????????????????Vl.min[
2
]?
=
?V.min[
2
];
????????????????Vl.max[
0
]?
=
?V.max[
0
];
????????????????Vl.max[
1
]?
=
?V.max[
1
];
????????????????Vl.max[
2
]?
=
?::gSplitPos;
????????????????Vr.min[
0
]?
=
?V.min[
0
];
????????????????Vr.min[
1
]?
=
?V.min[
1
];
????????????????Vr.min[
2
]?
=
?::gSplitPos;
????????????????Vr.max[
0
]?
=
?V.max[
0
];
????????????????Vr.max[
1
]?
=
?V.max[
1
];
????????????????Vr.max[
2
]?
=
?V.max[
2
];
????????????????
break
;
????????}
????}
else
{
????????Root?
=
?
new
?KDNode;?
//
Leaf
????????Root
->
Left?
=
?
0
;Root
->
Right?
=
?
0
;
????????Root
->
tag.AbsoluteOffset?
=
?BeginItr?
-
?::gScenePtr;
????????Root
->
Count?
=
?EndItr?
-
?BeginItr;
??????? //cout
<<
"
Leaf?LEVEL?:?
"
<<
Level
<<
"
\tCount?:?
"
<<
Root
->
Count
<<
endl;
????????
return
;
????}
????
++
Level;
????KDTreeBuild(Root
->
Left,Vl,BeginItr,MidItr,Axis,Level);
????KDTreeBuild(Root
->
Right,Vr,MidItr,EndItr,Axis,Level);
};
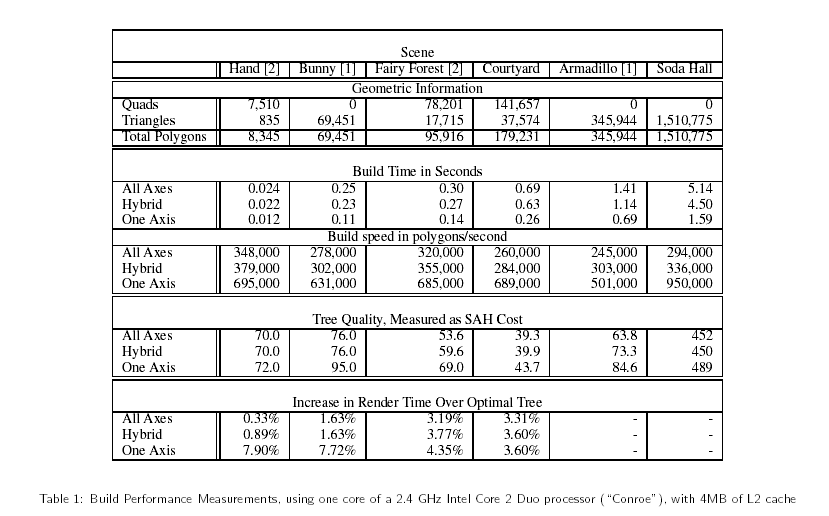
??? 這樣,我們就得到了一顆完整的基于SAH的KD樹。下面就是遍歷。
由于不同渲染要求的不同,遍歷代碼也大不相同。不過我們可以知道,kD樹及適用于光線跟蹤程序。目前在多款開源光線跟蹤器,比如blender就采用了kD樹作為加速結構。而且必須要提到的是,如果希望在Realtime Rendering的程序中使用光線跟蹤技術 —— 雖然說在目前的情況下還不是很現實,不過這畢竟是個趨勢,因為只有光線跟蹤才能夠精確的模擬物理全局光照,光柵化系統先天限制無法達到,雖然說Voxel渲染是一個折中的辦法。我引用下面的這張表格[3]作為性能參照。
可是這里又會出現一個問題,就是在實時渲染程序中如何處理多紋理貼圖?我們必須要模擬管線的處理過程。
A、如果場景中有運動的模型,標記出來
B、在世界坐標系統中對運動模型作矩陣變換,類似于OpenGL的MATRIX操作
C、把所有,各就各位的模型頂點、向量、紋理坐標、索引整合在一起。每當在這個鏈表中加入新的模型的時候,都要把現在模型的所有索引加上鏈表中已經加入的所有頂點的數目,構建一個好像是整體連續的單個模型。同時標記紋理,應該儲存一個頂點偏移量以及三角形數目,用來標示這個紋理屬于哪個模型。
D、根據視點,遍歷kD樹,把符合條件的三角形數目放入一個全局隊列
E、渲染隊列中的所有三角形,作為一個Frame。重復A。
目前由德國薩爾大學計算機科學系所開發的實時光線跟蹤硬件與軟件已經成功的問世,最令人振奮的莫過于表現了一個全部由光線跟蹤引擎實現的Quake3游戲。有興趣的朋友可以去[4]看看。
[1]Computer
Graphics WS05/06 – kD-Tree and Optimization for Ray Tracing
[2]Lib3ds
http://lib3ds.sf.net/
[3]Fast
kd-tree Construction with an Adaptive Error-Bounded Heuristic
[4]OpenRT http://www.openrt.de/