投影變換
將攝影空間中的三維物體投影到二維膠片上,也就是Direct3D中的屏幕,這種三維到二維的變換過程就是投影變換,即從取景空間到攝影空間的變換。設(shè)三維物體在觀察空間中的坐標(biāo)為Pview,投影矩陣為Mproj,則頂點(diǎn)在投影空間中的坐標(biāo)為:
Pproj = Pview * Mproj
下面分別介紹兩種基本的投影變換:正交投影和透視投影,以及它們?cè)贒irect3D中的實(shí)現(xiàn)。
1、正交投影
正交投影中,投影向量和觀察平面垂直,物體坐標(biāo)沿觀察坐標(biāo)系的z軸平行投影到觀察平面上,觀察點(diǎn)和觀察平面間的距離不會(huì)影響物體的投影大小。
工程設(shè)計(jì)中的頂視圖、前視圖和側(cè)視圖就是典型的正交投影。與世界變換、取景變換類似,只需先生成一個(gè)投影矩陣mat_proj,然后調(diào)用下面的代碼就可以設(shè)置投影矩陣:
g_device->SetTransform(D3DTS_PROJECTION, &mat_proj);
下面來看看正交投影矩陣的生成。對(duì)于正交投影來說,它的取景范圍是一個(gè)長方體,只有在這個(gè)長方體中的景物才會(huì)被繪制出來。
Direct3D擴(kuò)展實(shí)用庫提供了函數(shù)D3DXMatrixOrthoLH(),用于創(chuàng)建一個(gè)正交投影矩陣,函數(shù)D3DXMatrixOrthoLH()的聲明如下:
Builds a left-handed orthographic projection matrix.
D3DXMATRIX * D3DXMatrixOrthoLH(
D3DXMATRIX * pOut,
FLOAT w,
FLOAT h,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the resulting D3DXMATRIX.
- w
- [in] Width of the view volume.
- h
- [in] Height of the view volume.
- zn
- [in] Minimum z-value of the view volume which is
referred to as z-near.
- zf
- [in] Maximum z-value of the view volume which is
referred to as z-far.
Return Values
Pointer to the resulting D3DXMATRIX.
Remarks
All the parameters of the D3DXMatrixOrthoLH
function are distances in camera space. The parameters describe the dimensions
of the view volume.
The return value for this function is the same value
returned in the pOut parameter. In this way, the D3DXMatrixOrthoLH
function can be used as a parameter for another function.
This function uses the following formula to compute the
returned matrix.
2/w 0 0 0
0 2/h 0 0
0 0 1/(zf-zn) 0
0 0 -zn/(zf-zn) 1
2、透視投影
透視投影實(shí)現(xiàn)的是一個(gè)縮放、透視的投影。透視投影的特點(diǎn)是,距離攝像機(jī)越遠(yuǎn)的物體在投影平面上的成像越小,透視投影的取景范圍是一個(gè)截頭體(四棱臺(tái))。這個(gè)截頭體稱為取景截頭體(viewing
frustum),攝像機(jī)位于四棱錐的頂點(diǎn)。這個(gè)四棱錐被截頭體的遠(yuǎn)平面和近平面分割,遠(yuǎn)近裁剪面中間的部分就是取景截頭體,只有這個(gè)空間里的對(duì)象才是可見的。
透視投影矩陣的作用就是將取景截頭體內(nèi)的景物投影到攝像機(jī)的二維膠片上,可以利用Direct3D功能擴(kuò)展庫提供的D3DXMatrixPerspectiveFovLH(),構(gòu)建一個(gè)透視投影矩陣:
Builds a left-handed perspective projection matrix
based on a field of view.
D3DXMATRIX * D3DXMatrixPerspectiveFovLH(
D3DXMATRIX * pOut,
FLOAT fovy,
FLOAT Aspect,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- fovy
- [in] Field of view in the y direction, in radians.
- Aspect
- [in] Aspect ratio, defined as view space width
divided by height.
- zn
- [in] Z-value of the near view-plane.
- zf
- [in] Z-value of the far view-plane.
Return Values
Pointer to a D3DXMATRIX structure that is a
left-handed perspective projection matrix.
Remarks
The return value for this function is the same value
returned in the pOut parameter. In this way, the D3DXMatrixPerspectiveFovLH
function can be used as a parameter for another function.
This function computes the returned matrix as shown:
xScale 0 0 0
0 yScale 0 0
0 0 zf/(zf-zn) 1
0 0 -zn*zf/(zf-zn) 0
where:
yScale = cot(fovY/2)
xScale = yScale / aspect ratio
透視投影矩陣的作用是將一個(gè)取景截頭體轉(zhuǎn)換成一個(gè)立方體。因?yàn)榻仡^體的近端比遠(yuǎn)端小,所以靠近攝像機(jī)的對(duì)象將被放大,而對(duì)象距離攝像機(jī)越遠(yuǎn),其成像越小,這就是場景的透視原理。透視變換把一個(gè)取景截頭體轉(zhuǎn)換成一個(gè)新的坐標(biāo)空間,注意,該截頭體變成了一個(gè)立方體,同時(shí),原點(diǎn)從場景的右上角移動(dòng)到了立方體的中心。在透視變換中,x軸和z軸方向的極限都是-1和1,z軸方向?qū)τ谇捌矫娴臉O限是0,對(duì)后平面的極限是1。
另外,D3DX還提供了下列函數(shù)供程序員創(chuàng)建透視投影變換矩陣:
D3DXMatrixPerspectiveLH
Builds a left-handed perspective projection matrix
D3DXMATRIX * D3DXMatrixPerspectiveLH(
D3DXMATRIX * pOut,
FLOAT w,
FLOAT h,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- w
- [in] Width of the view volume at the near
view-plane.
- h
- [in] Height of the view volume at the near
view-plane.
- zn
- [in] Z-value of the near view-plane.
- zf
- [in] Z-value of the far view-plane.
Return Values
Pointer to a D3DXMATRIX structure that is a
left-handed perspective projection matrix.
Remarks
All the parameters of the D3DXMatrixPerspectiveLH
function are distances in camera space. The parameters describe the dimensions
of the view volume.
The return value for this function is the same value
returned in the pOut parameter. In this way, the D3DXMatrixPerspectiveLH
function can be used as a parameter for another function.
This function uses the following formula to compute the
returned matrix.
2*zn/w 0 0 0
0 2*zn/h 0 0
0 0 zf/(zf-zn) 1
0 0 zn*zf/(zn-zf) 0
D3DXMatrixPerspectiveRH
Builds a right-handed perspective projection matrix.
D3DXMATRIX * D3DXMatrixPerspectiveRH(
D3DXMATRIX * pOut,
FLOAT w,
FLOAT h,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- w
- [in] Width of the view volume at the near
view-plane.
- h
- [in] Height of the view volume at the near
view-plane.
- zn
- [in] Z-value of the near view-plane.
- zf
- [in] Z-value of the far view-plane.
Return Values
Pointer to a D3DXMATRIX structure that is a
right-handed perspective projection matrix.
Remarks
All the parameters of the D3DXMatrixPerspectiveRH
function are distances in camera space. The parameters describe the dimensions
of the view volume.
The return value for this function is the same value
returned in the pOut parameter. In this way, the D3DXMatrixPerspectiveRH
function can be used as a parameter for another function.
This function uses the following formula to compute the
returned matrix.
2*zn/w 0 0 0
0 2*zn/h 0 0
0 0 zf/(zn-zf) -1
0 0 zn*zf/(zn-zf) 0
D3DXMatrixPerspectiveFovRH
Builds a right-handed perspective projection matrix
based on a field of view.
D3DXMATRIX * D3DXMatrixPerspectiveFovRH(
D3DXMATRIX * pOut,
FLOAT fovy,
FLOAT Aspect,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- fovy
- [in] Field of view in the y direction, in radians.
- Aspect
- [in] Aspect ratio, defined as view space width
divided by height.
- zn
- [in] Z-value of the near view-plane.
- zf
- [in] Z-value of the far view-plane.
Return Values
Pointer to a D3DXMATRIX structure that is a
right-handed perspective projection matrix.
Remarks
The return value for this function is the same value
returned in the pOut parameter. In this way, the D3DXMatrixPerspectiveFovRH
function can be used as a parameter for another function.
This function computes the returned matrix as shown.
xScale 0 0 0
0 yScale 0 0
0 0 zf/(zn-zf) -1
0 0 zn*zf/(zn-zf) 0
where:
yScale = cot(fovY/2)
xScale = yScale / aspect ratio
D3DXMatrixPerspectiveOffCenterLH
Builds a customized, left-handed perspective projection
matrix.
D3DXMATRIX * D3DXMatrixPerspectiveOffCenterLH(
D3DXMATRIX * pOut,
FLOAT l,
FLOAT r,
FLOAT b,
FLOAT t,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- l
- [in] Minimum x-value of the view volume.
- r
- [in] Maximum x-value of the view volume.
- b
- [in] Minimum y-value of the view volume.
- t
- [in] Maximum y-value of the view volume.
- zn
- [in] Minimum z-value of the view volume.
- zf
- [in] Maximum z-value of the view volume.
Return Values
Pointer to a D3DXMATRIX structure that is a
customized, left-handed perspective projection matrix.
Remarks
All the parameters of the
D3DXMatrixPerspectiveOffCenterLH function are distances in camera space. The
parameters describe the dimensions of the view volume.
The return value for this function is the same value
returned in the pOut parameter. In this way, the
D3DXMatrixPerspectiveOffCenterLH function can be used as a parameter for
another function.
This function uses the following formula to compute the
returned matrix.
2*zn/(r-l) 0 0 0
0 2*zn/(t-b) 0 0
(l+r)/(l-r) (t+b)/(b-t) zf/(zf-zn) 1
0 0 zn*zf/(zn-zf) 0
D3DXMatrixPerspectiveOffCenterRH
Builds a customized, right-handed perspective
projection matrix.
D3DXMATRIX * D3DXMatrixPerspectiveOffCenterRH(
D3DXMATRIX * pOut,
FLOAT l,
FLOAT r,
FLOAT b,
FLOAT t,
FLOAT zn,
FLOAT zf
);
Parameters
- pOut
- [in, out] Pointer to the D3DXMATRIX structure that
is the result of the operation.
- l
- [in] Minimum x-value of the view volume.
- r
- [in] Maximum x-value of the view volume.
- b
- [in] Minimum y-value of the view volume.
- t
- [in] Maximum y-value of the view volume.
- zn
- [in] Minimum z-value of the view volume.
- zf
- [in] Maximum z-value of the view volume.
Return Values
Pointer to a D3DXMATRIX structure that is a
customized, right-handed perspective projection matrix.
Remarks
All the parameters of the
D3DXMatrixPerspectiveOffCenterRH function are distances in camera space. The
parameters describe the dimensions of the view volume.
The return value for this function is the same value
returned in the pOut parameter. In this way, the
D3DXMatrixPerspectiveOffCenterRH function can be used as a parameter for
another function.
This function uses the following formula to compute the
returned matrix.
2*zn/(r-l) 0 0 0
0 2*zn/(t-b) 0 0
(l+r)/(r-l) (t+b)/(t-b) zf/(zn-zf) -1
0 0 zn*zf/(zn-zf) 0
3、w友好投影矩陣
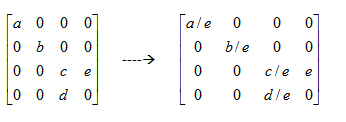
經(jīng)過頂點(diǎn)坐標(biāo)變換后,每個(gè)頂點(diǎn)坐標(biāo)將具有4個(gè)元素(x, y, z, w)。Direct3D使用這個(gè)w坐標(biāo)在深度緩沖區(qū)和霧化效果中執(zhí)行一些深度相關(guān)的運(yùn)算。為了能夠使用這個(gè)w坐標(biāo)進(jìn)行深度相關(guān)運(yùn)算,要求投影矩陣必須是w友好投影矩陣(w-friendly
projection matrix,也稱作兼容矩陣),即投影矩陣第三行第四列的元素必須是1,以使w坐標(biāo)與世界空間中頂點(diǎn)的z坐標(biāo)相當(dāng)。如果投影變換矩陣第三行第四列的元素不是1,必須將所有的矩陣元素除以投影矩陣第三行第四列元素的值,將投影矩陣變換為w友好投影矩陣。如果沒有提供一個(gè)w友好投影矩陣,基于深度的霧化效果和深度緩沖就不能正確實(shí)現(xiàn)。
下面給出的就是從一個(gè)非w友好投影矩陣到w友好投影矩陣的轉(zhuǎn)換。
Direct3D在進(jìn)行以w為基礎(chǔ)的深度計(jì)算中,需要使用w友好投影矩陣,因此即使應(yīng)用程序不需要進(jìn)行頂點(diǎn)坐標(biāo)變換,也需要設(shè)置一個(gè)w友好投影矩陣。通過實(shí)用庫函數(shù)D3DXMatrixPerspectiveFovLH()得到的投影矩陣通常都是w友好投影矩陣,所以通常不需要關(guān)心這個(gè)問題。