新建網頁 1
我們使用D3DXMatrixLookAtLH函數來計算視圖空間變換矩陣。這個函數對于在固定位置布置和對準攝像機是非常好用的,不過它的用戶接口對于要響應用戶輸入來實現攝像機移動就不那么好用了。這就激發我們用我們自己的方法來解決,這里我們展示了怎樣實現一個Camera類,它使我們能夠比D3DXMatrixLookAtLH函數更好地操作攝像機,并且可以用來作為飛行模擬攝像機和第一人稱視角攝像機。
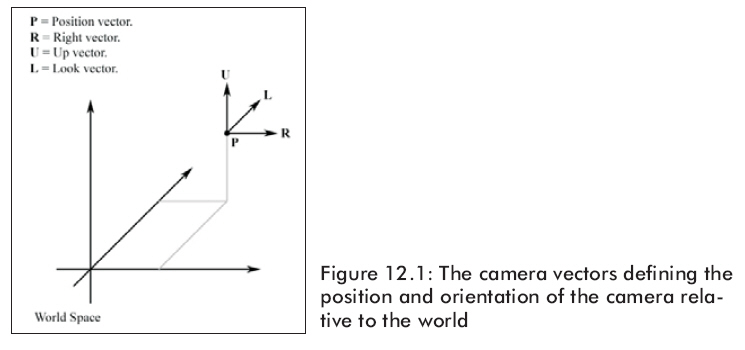
我們定義一個相對于世界坐標系的位置和攝像機的方向,這里使用四個攝像機向量:right vector , up vector,look vector 以及 position vector,如圖12.1所示。這些向量用來為攝像機定義一個坐標系來描述在世界坐標中的對應關系。因為 right ,up 和 look 向量定義了攝像機在世界中的方向,我們有時把它們三個向量一起稱為方向向量(orientation vectors)。方向向量必須被標準化。假如彼此互相垂直且都是單位長度,那么我們就稱它們是正交標準化向量。我們做這些限制是因為等一會兒我們要將方向向量插入到一個行矩陣中。因為行向量是正交標準化的,所以該矩陣也就是正交矩陣。回憶一下,正交矩陣有一個特性就是它的逆矩陣等于它的轉置矩陣。
有了這四個向量來描述攝像機,我們的攝像機就能夠按照下面六種方式變化了:
圍繞right向量旋轉(pitch傾斜)
圍繞up向量旋轉(yaw偏航)
圍繞look向量旋轉(roll滾轉)
沿著right向量平移(strafe)
沿著up向量飛行(fly)
沿著look向量移動(move)
通過這六種操作,我們能夠沿著三個軸移動以及饒著三個軸旋轉,這給了我們一個六度的自由。下面的Camera類定義了我們要的描述數據以及想要的方法:
enum eCameraType { LAND_OBJECT, AIR_CRAFT };
class cCamera
{
private:
eCameraType m_camera_type;
D3DXVECTOR3 m_right;
D3DXVECTOR3 m_up;
D3DXVECTOR3 m_look;
public:
D3DXVECTOR3 m_pos;
public:
cCamera();
cCamera(eCameraType camera_type);
~cCamera() { };
void strafe(float units); // left/right
void fly(float units); // up/down
void walk(float units); // forward/backward
void pitch(float angle); // rotate on right vector
void yaw(float angle); // rotate on up vector
void roll(float angle); // rotate on look vector
void get_view_matrix(D3DXMATRIX* v);
void set_camera_type(eCameraType camera_type);
void get_right(D3DXVECTOR3* right);
void get_up(D3DXVECTOR3* up);
void get_look(D3DXVECTOR3* look);
};
在類中我們定義了一個還沒有討論的eCameraType枚舉類型。目前,我們的攝像機支持兩種攝像機模式,LANDO_BJECT模式和AIR_CRAFT模式。AIR_CRAFT模式允許我們在空間中完全自由的移動。不過,在有些游戲中,比如第一人稱設計游戲,人是不能飛的;因此我們必須限制它在某些軸上的運動。指定為LAND_OBJECT模式的攝像機就限制了這些。
12.2.1計算視圖矩陣
我們現在演示怎樣根據攝像機向量來計算視圖矩陣變換的。讓 p = (px,py,pz),r = (rx,ry,rz),u = (ux,uy,uz)以及 d = (dx,dy,dz)分別表示 position, right, up 以及 look 向量。
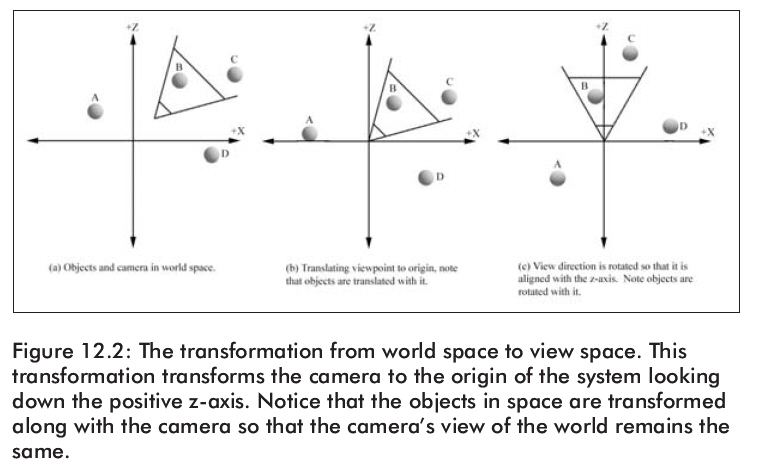
視圖空間變換是指在世界坐標系中進行幾何變換以便將照相機平移變換到坐標系的原點并把它的方向旋轉至朝向Z軸的正方向(如圖12.2)。
因此,我們希望有一個象這樣的變換矩陣V:
pV = (0, 0, 0)—矩陣V能將攝像機移動到原點。
rV = (1, 0, 0)—矩陣V能將攝像機的right向量與世界坐標系中的x軸對齊。
uV = (0, 1, 0)—矩陣V能將攝像機的up向量與世界坐標系中的y軸對齊。
dV = (0, 0, 1)—矩陣V能將攝像機的look向量與世界坐標系中的z軸對齊。
我們能將變換任務分為兩個部分:1)平移部分,將攝像機的位置移動到原點;2)旋轉部分,將攝像機的方向向量與世界坐標系的軸對齊。
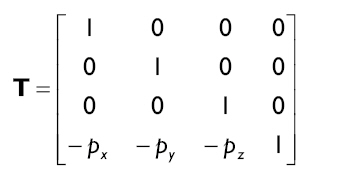
12.2.1.1 第一部分:平移
平移只需要利用 –p就可簡單地將 p 移動到原點,因為 p–p=0。因此我們能夠用下面的矩陣來描述視圖變換中的平移部分:
12.2.1.2 第二部分:旋轉
矯正攝像機的三個方向向量使其與世界坐標系的軸對齊需要更多的工作。我們需要一個3*3的旋轉矩陣A,它能將right,up和look分別與x-,y-以及z軸對齊。這個矩陣將滿足如下三個等式:
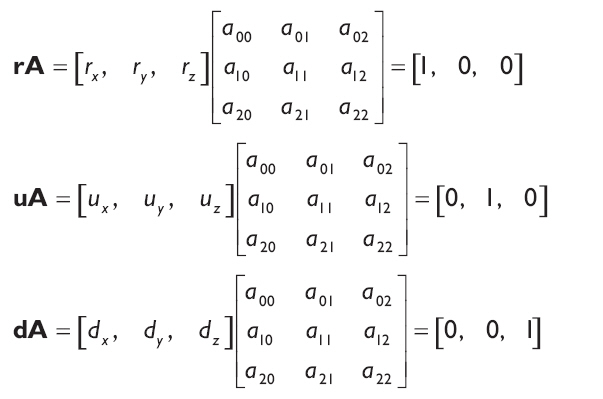
注意:我們在這里使用3*3矩陣來工作是因為現在不需要額外的信息來表現旋轉。等一下我們將它增加到常用的4*4矩陣。
因為這三個等式都有一個相同系數矩陣A ,所以我們能夠把它們合在一起。我們把它們從新寫到一起來:
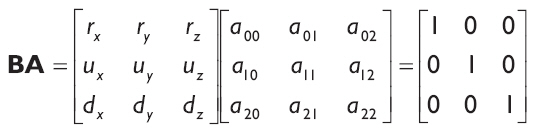
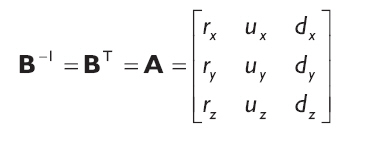
求A有很多方法,但是我們知道A是B逆矩陣因為BA = BB-1 = I。因為B 是一個正交矩陣(它的行向量是正交標準化的),我們知道它的逆矩陣就是它的轉置矩陣。因此,將方向向量和世界坐標系中的坐標軸對齊的變換如下:
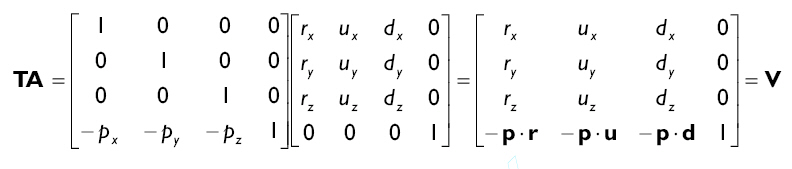
12.2.1.3 將兩部分合并
最后,將A增加為4*4矩陣,同時將平移部分合并到旋轉部分形成的視圖變換矩陣V:
我們在cCamera::get_view_matrix方法中建立這個矩陣:
void cCamera::get_view_matrix(D3DXMATRIX* v)
{
// keep camera's axis orthogonal to each other
D3DXVec3Normalize(&m_look, &m_look);
D3DXVec3Cross(&m_up, &m_look, &m_right);
D3DXVec3Normalize(&m_up, &m_up);
D3DXVec3Cross(&m_right, &m_up, &m_look);
D3DXVec3Normalize(&m_right, &m_right);
// build the view matrix
float x = -D3DXVec3Dot(&m_right, &m_pos);
float y = -D3DXVec3Dot(&m_up, &m_pos);
float z = -D3DXVec3Dot(&m_look, &m_pos);
(*v)(0, 0) = m_right.x; (*v)(0, 1) = m_up.x; (*v)(0, 2) = m_look.x; (*v)(0, 3) = 0.0f;
(*v)(1, 0) = m_right.y; (*v)(1, 1) = m_up.y; (*v)(1, 2) = m_look.y; (*v)(1, 3) = 0.0f;
(*v)(2, 0) = m_right.z; (*v)(2, 1) = m_up.z; (*v)(2, 2) = m_look.z; (*v)(2, 3) = 0.0f;
(*v)(3, 0) = x; (*v)(3, 1) = y; (*v)(3, 2) = z; (*v)(3, 3) = 1.0f;
}
你可能想知道方法中前面幾行代碼是干什么的。在幾次旋轉后,攝像機的方向向量可能變的不相互垂直了。因此,每當該函數被調用時,我們根據look向量重新計算up和right向量,使它們保持相互垂直。新的up向量是這樣計算的up = look × right。 接著新的right向量是這樣計算的right = up × look