新建網頁 1
矩形邊界框
另一種常見的用來界定物體的幾何圖元是矩形邊界框,矩形邊界框可以是與軸對齊的或是任意方向的����。軸對齊矩形邊界框有一個限制���,就是它的邊必須垂直于坐標軸��?��?s寫AABB常用來表示axially aligned bounding box(軸對齊矩形邊界框)���,OBB用來表示oriented bounding box(方向矩形邊界框)。軸對齊矩形邊界框不僅容易創建,而且易于使用�����。
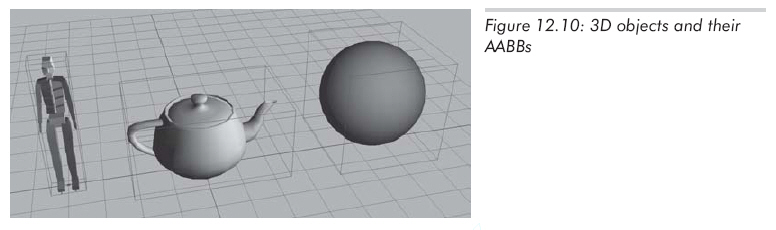
一個3D的AABB就是一個簡單的六面體����,每一邊都平行于一個坐標平面。矩形邊界框不一定是立方體,它的長、寬�����、高可以彼此不同��。在圖12.10中�,畫出了一些簡單的3D物體和它們的AABB�����。
AABB的表達方法
先介紹AABB的一些重要性質和引用這些值時所用到的記法��。AABB內的點滿足下列等式:
xmin ≤ x ≤ xmax
ymin ≤ y ≤ ymax
zmin ≤ z ≤ zmax
特別重要的兩個點為:
pmin = [xmin ymin zmin ]
pmax = [xmax ymax zmax ]
中心點c為:
c = (pmin + pmax) /2
"尺寸向量"s是從pmin指向pmax的向量,包含了矩形邊界的長、寬���、高:
s = pmax - pmin
還可以求出矩形邊界框的"半徑向量"r,它是從中心指向pmax的向量:
r = pmax - c = s/2
明確地定義一個AABB只需要pmin、pmax���、c、s�����、r這5個向量中的兩個(除s和r不能配對外����,它們中的任意兩個都可配對)����。在一些情況下,某些配對形式比其他的會更有用�。我們建議用pmin和pmax表示一個邊界框����,因為實際應用中����,使用它們的頻率遠高于c、s�、r����。當然��,由pmin和pmax計算其余三個中的任意一個都是很容易的�。
在我們的C++代碼中,使用下面的類表示AABB��,這是一個縮略的代碼清單��。
#ifndef AABB3_H
#define AABB3_H
#include "vector3.h"
class cMatrix4x3;
//---------------------------------------------------------------------------
// Implement a 3D axially aligned bounding box
//---------------------------------------------------------------------------
class cAABB3
{
public:
cVector3 min, max;
public:
// query for dimentions
cVector3 size() const { return max - min; }
float x_size() { return max.x - min.x; }
float y_size() { return max.y - min.y; }
float z_size() { return max.z - min.z; }
cVector3 center() const { return (min + max) * 0.5f; }
// fetch one of the eight corner points
cVector3 corner(int i) const;
// "Empty" the box, by setting the values to really large/small numbers.
void empty();
// add a point to the box
void add(const cVector3& p);
// add an AABB to the box
void add(const cAABB3& box);
// return true if the box is empty
bool is_empty() const;
// return true if the box contains a point
bool contains(const cVector3& p) const;
// transform the box and compute the new AABB
void set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m);
// return the clostet point on this box to another point
cVector3 clostet_point_to(const cVector3& p) const;
};
#endif
計算AABB
計算一個頂點集合的AABB是非常簡單的��,先將最小值和最大值設為"正負無窮大"或任何比實際中用到的數都大或小得多的數。接著�����,遍歷全部點����,并擴展邊界框直到它包含所有點為止。
我們在cAABB類中引入了兩個輔助函數,第一個函數負責"清空"AABB:
//---------------------------------------------------------------------------
// "Empty" the box, by setting the values to really large/small numbers.
//---------------------------------------------------------------------------
void cAABB3::empty()
{
const float big_number = 1e37f;
min.x = min.y = min.z = big_number;
max.x = max.y = max.z = -big_number;
}
第二個函數將單個點"
加"到AABB中,并在必要的時候擴展AABB
以包含每個點:
//---------------------------------------------------------------------------
// Add a point to the box
//---------------------------------------------------------------------------
void cAABB3::add(const cVector3& p)
{
// expand the box as necessary to contain the point
if(p.x < min.x) min.x = p.x;
if(p.x > max.x) max.x = p.x;
if(p.y < min.y) min.y = p.y;
if(p.y > max.y) max.y = p.y;
if(p.z < min.z) min.z = p.z;
if(p.z > max.z) max.z = p.z;
}
現在���,從一個點集創建矩形邊界框����,可以使用下面的代碼:
Listing 12.1: Computing the AABB for a set of points
// Our list of points
const int n;
Vector3 list[n];
// First, empty the box
AABB3 box;
box.empty();
// Add each point into the box
for (int i = 0 ; i < n ; ++i)
box.add(list[i]);
取得AABB的頂點:
//--------------------------------------------------------------------------------------
// Return one of the 8 corner points. The points are numbered as follows:
//
// 6 7
// ------------------------------
// /| /|
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// / | / |
// 2 / | 3 / |
// /----------------------------/ |
// | | | |
// | | | | +Y
// | 4 | | |
// | |-----------------|----------| |
// | / | / 5 |
// | / | / | +Z
// | / | / |
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / | /
// | / | / |/
// |/ |/ ----------------- +X
// ------------------------------
// 0 1
//
// Bit 0 selects min.x vs. max.x
// Bit 1 selects min.y vs. max.y
// Bit 2 selects min.z vs. max.z
//--------------------------------------------------------------------------------------
cVector3 cAABB3::corner(int i) const
{
assert(i >= 0 && i <= 7); // make sure index is in range
return cVector3((i & 1) ? max.x : min.x,
(i & 2) ? max.y : min.y,
(i & 4) ? max.z : min.z);
}
其他的相關函數,具體功能詳見注釋:
//---------------------------------------------------------------------------
// Add an AABB to the box
//---------------------------------------------------------------------------
void cAABB3::add(const cAABB3& box)
{
// expand the box as necessary
if(box.min.x < min.x) min.x = box.min.x;
if(box.min.x > max.x) max.x = box.min.x;
if(box.min.y < min.y) min.y = box.min.y;
if(box.min.y > max.y) max.y = box.min.y;
if(box.min.z < min.z) min.z = box.min.z;
if(box.min.z > max.z) max.z = box.min.z;
}
//---------------------------------------------------------------------------
// Return true if the box is empty
//---------------------------------------------------------------------------
bool cAABB3::is_empty() const
{
// check if we're inverted on any axis
return (min.x > max.x) || (min.y > max.y) || (min.z > max.z);
}
//---------------------------------------------------------------------------
// Return true if the box contains a point
//---------------------------------------------------------------------------
bool cAABB3::contains(const cVector3& p) const
{
// check for overlap on each axis
return (p.x >= min.x) && (p.x <= max.x) &&
(p.y >= min.y) && (p.y <= max.y) &&
(p.z >= min.z) && (p.z <= max.z);
}
//---------------------------------------------------------------------------
// return the closest point on this box to another point
//---------------------------------------------------------------------------
cVector3 cAABB3::clostet_point_to(const cVector3& p) const
{
// "push" p into the box, on each dimension.
cVector3 r;
if(p.x < min.x)
r.x = min.x;
else if(p.x > max.x)
r.x = max.x;
else
r.x = p.x;
if(p.y < min.y)
r.y = min.y;
else if(p.y > max.y)
r.y = max.y;
else
r.y = p.y;
if(p.z < min.z)
r.z = min.z;
else if(p.z > max.z)
r.z = max.z;
else
r.z = p.z;
return r;
}
AABB與邊界球
很多情況下���,AABB比邊界球更適合于做定界球:
(1)計算一個點集的AABB,在編程上更容易實現���,并能在較短的時間內完成。計算邊界球則困難得多����。
(2)對實際世界里的許多物體���,AABB提供了一種"更緊湊"的邊界�����。當然,對于某些物體����,邊界球更好(設想一個本身就是球形的物體)�。在極端情況下��,AABB的體積可能僅相當于邊界球體積的1/2��,大部分時候邊界球的體積會比矩形框的體積大得多,比較一下電線桿的邊界球和AABB就知道了����。圖12.11所示為不同物體的AABB與邊界球的比較����。
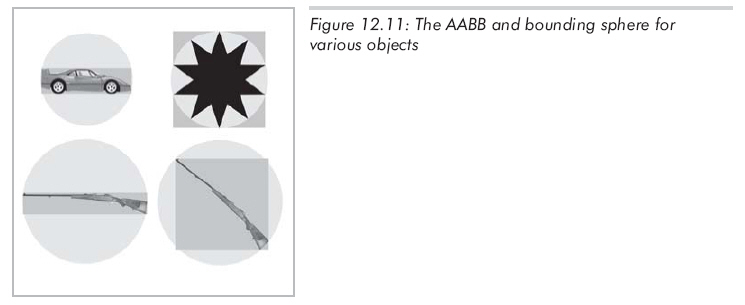
邊界球的根本問題是它的形狀只有一個自由度----半徑����,而AABB卻有三個自由度----長��、寬���、高����。因此���,它可以調節這些自由度以適應不同物體��。對圖12.11中的大部分物體�,除了右上角的星形體外�,AABB都比邊界球小。對這顆星,邊界球也僅比AABB略小一些。通過圖12.11��,我們可以注意到AABB對物體的方向很敏感���。比較下面兩支槍的AABB�,圖中槍的大小都是相同的,只是方向不同而已;還應注意到在這一情況下邊界球大小相同���,因為邊界球對物體方向不敏感��。
變換AABB
當物體在虛擬世界中移動時,它的AABB也需要隨之移動�����。此時我們有兩個選擇----用變換后的物體來重新計算AABB��,或者對AABB做和物體同樣的變換。所得到的結果不一定是軸對齊的(如果物體旋轉),也不一定是盒狀的(如果物體發生了扭曲)���。不過,通過"變換后的AABB"進行計算要比通過"經過變換后的物體"計算AABB快得多,因為AABB只有8個頂點�����。
通過"變換后的AABB"計算不能只是簡單地變換8個頂點����,也不能通過轉換原pmin和pmax來得到新的pmin和pmax ----這樣可能會導致xmin > xmax。為了計算新的AABB,必須先變換8個頂點�����,再從這8個頂點中計算一個新的AABB����。
根據變換的不同,這種方法可能使新邊界框比原邊界框大許多。例如,在2D中����,45度的旋轉會大大增加邊界框的尺寸�����,如圖12.12所示:
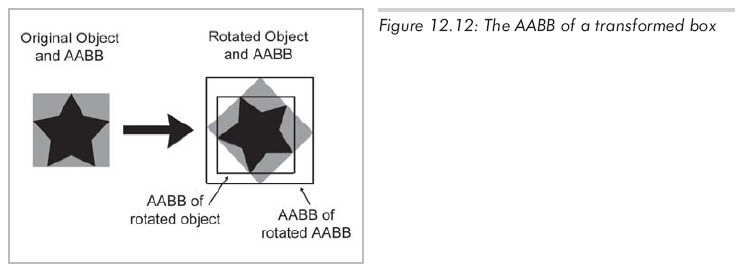
比較圖12.12中原AABB(灰色框)和新AABB(右邊較大的方框),它是通過旋轉后的AABB計算的,新AABB幾乎是原來的兩倍���。注意,如果從旋轉后的物體而不是通過旋轉后的AABB來計算新AABB,它的大小將和原來的AABB相同。
可以利用AABB的結構來加快新的AABB的計算速度����,而不必先變換8個頂點�,再從這8個頂點中計算新AABB����。
讓我們簡單回顧一下3x3矩陣變換一個3D點的過程:
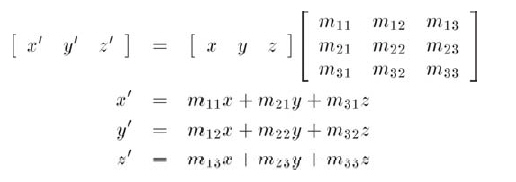
設原邊界框為xmin���,xmax����,ymin...,新邊界框計算將得到x'min����,x'max�,y'min...?��,F在我們的任務就是想辦法加快計算x'min的速度��,換句話說����,我們希望找到m11x+m21y+m31z的最小值��,其中[x, y, z]是原8個頂點中的任意一個����,我們所要做的就是找出這些點經過變換后誰的x坐標最小�����?���?吹谝粋€乘積:m11x,為了最小化乘積����,必須決定是用xmin還是xmax來代換其中的x。顯然����,如果m11>0���,用xmin能得到最小化乘積��;如果m11<0,則用xmax能得到最小化乘積��。比較方便的是����,不管xmin和xmax中哪個被用來計算xmin,都可以用另外一個來計算xmax����?����?梢詫仃?個元素中的每個都應用這個計算過程,如下列代碼所示:
//---------------------------------------------------------------------------
// Transform the box and compute the new AABB. Remember, this always
// results in an AABB that is at least as big as the origin, and may be
// considerably bigger.
//---------------------------------------------------------------------------
void cAABB3::set_to_transformed_box(const cAABB3& box, const cMatrix4x3& m)
{
// if we're empty, then bail.
if(box.is_empty())
{
empty();
return;
}
// start with the translation portion
min = max = get_translation(m);
// examine each of the 9 matrix elements and compute the new AABB
if(m.m11 > 0.0f)
{
min.x += m.m11 * box.min.x;
max.x += m.m11 * box.max.x;
}
else
{
min.x += m.m11 * box.max.x;
max.x += m.m11 * box.min.x;
}
if(m.m21 > 0.0f)
{
min.x += m.m21 * box.min.y;
max.x += m.m21 * box.max.y;
}
else
{
min.x += m.m21 * box.max.y;
max.x += m.m21 * box.min.y;
}
if(m.m31 > 0.0f)
{
min.x += m.m31 * box.min.z;
max.x += m.m31 * box.max.z;
}
else
{
min.x += m.m31 * box.max.z;
max.x += m.m31 * box.min.z;
}
if(m.m12 > 0.0f)
{
min.y += m.m12 * box.min.x;
max.y += m.m12 * box.max.x;
}
else
{
min.y += m.m12 * box.max.x;
max.y += m.m12 * box.min.x;
}
if(m.m22 > 0.0f)
{
min.y += m.m22 * box.min.y;
max.y += m.m22 * box.max.y;
}
else
{
min.y += m.m22 * box.max.y;
max.y += m.m22 * box.min.y;
}
if(m.m32 > 0.0f)
{
min.y += m.m32 * box.min.z;
max.y += m.m32 * box.max.z;
}
else
{
min.y += m.m32 * box.max.z;
max.y += m.m32 * box.min.z;
}
if(m.m13 > 0.0f)
{
min.z += m.m13 * box.min.x;
max.z += m.m13 * box.max.x;
}
else
{
min.z += m.m13 * box.max.x;
max.z += m.m13 * box.min.x;
}
if(m.m23 > 0.0f)
{
min.z += m.m23 * box.min.y;
max.z += m.m23 * box.max.y;
}
else
{
min.z += m.m23 * box.max.y;
max.z += m.m23 * box.min.y;
}
if(m.m33 > 0.0f)
{
min.z += m.m33 * box.min.z;
max.z += m.m33 * box.max.z;
}
else
{
min.z += m.m33 * box.max.z;
max.z += m.m33 * box.min.z;
}
}