正交矩陣的運(yùn)算法則
若方陣M是正交的,則當(dāng)且僅當(dāng)M與它轉(zhuǎn)置矩陣MT的乘積等于單位矩陣,見(jiàn)公式9.8:
矩陣乘以它的逆等于單位矩陣:M M-1 = I
所以,如果一個(gè)矩陣是正交的,那么它的轉(zhuǎn)置等于它的逆:

這是一條非常有用的性質(zhì),因?yàn)樵趯?shí)際應(yīng)用中經(jīng)常需要計(jì)算矩陣的逆,而3D圖形計(jì)算中正交矩陣出現(xiàn)又是如此頻繁。比如旋轉(zhuǎn)和鏡像矩陣是正交的,如果知道矩陣是正交的,就可以完全避免計(jì)算逆矩陣了,這也將大大減少計(jì)算量。
正交矩陣的幾何解釋
正交矩陣對(duì)我們非常有用,因?yàn)楹苋菀子?jì)算它的逆矩陣。但怎樣知道一個(gè)矩陣是否正交,以利用它的性質(zhì)呢?
很多情況下,我們可以提前知道矩陣是如何建立的,甚至了解矩陣是僅包含旋轉(zhuǎn)、鏡像呢,還是二者皆有(記住:旋轉(zhuǎn)和鏡像矩陣是正交的)。這種情況非常普遍。
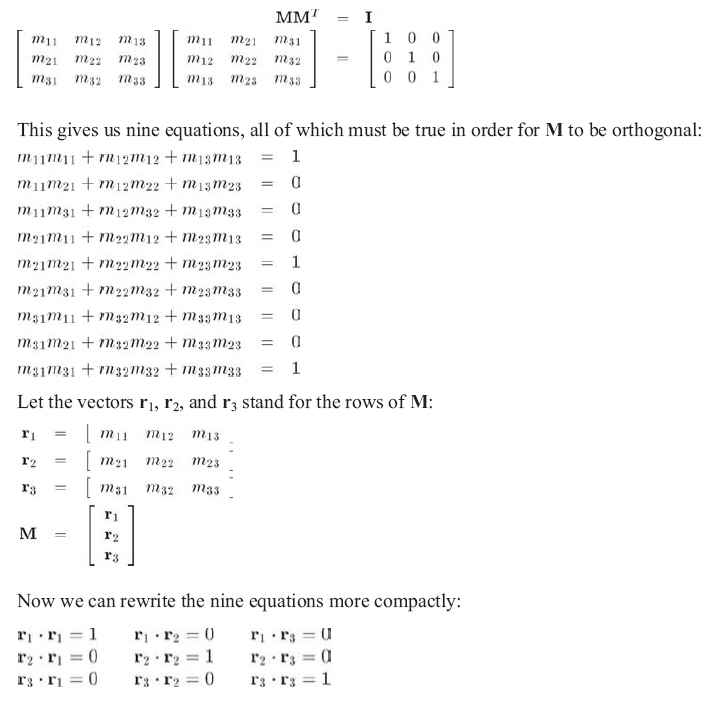
如果無(wú)法提前清楚矩陣的某些情況呢?換句話(huà)說(shuō),對(duì)于任意矩陣M,怎樣檢測(cè)它是否正交?為了做到這一點(diǎn),讓我們從正交矩陣的定義開(kāi)始,以3x3階矩陣為例。設(shè)M是3x3矩陣,根據(jù)定義,當(dāng)且僅當(dāng)
M MT = I 時(shí)M是正交的。它的確切含義如下:
現(xiàn)在做一些解釋?zhuān)?/p>
(1)當(dāng)且僅當(dāng)一個(gè)向量是單位向量時(shí),它與自身的點(diǎn)積結(jié)果是1。因此,僅當(dāng)r1、r2、r3是單位向量時(shí),第1、5、9式才能成立。
(2)當(dāng)且僅當(dāng)兩個(gè)向量是互相垂直時(shí),它們的點(diǎn)積為0。因此,僅當(dāng)r1、r2、r3互相垂直時(shí)其他等式才成立。
所以,若一個(gè)矩陣是正交的,它必須滿(mǎn)足下列條件:
矩陣的每一行都是單位向量,矩陣的所有行互相垂直。
對(duì)矩陣的列也能得到類(lèi)似的條件,這使得以下結(jié)論非常清楚:如果M是正交的,則MT也是正交的。
計(jì)算逆矩陣時(shí),僅在預(yù)先知道矩陣是正交的情況下才能利用正交性的優(yōu)點(diǎn)。如果預(yù)先不知道,那么檢查正交性經(jīng)常是浪費(fèi)時(shí)間。即使在最好的情況下,先檢查正交性以確定矩陣是否正交再進(jìn)行轉(zhuǎn)置,和一開(kāi)始就進(jìn)行求逆運(yùn)算也將耗費(fèi)同樣多的時(shí)間。而如果矩陣不是正交,那么這種檢查完全是浪費(fèi)時(shí)間。
注意,有一個(gè)術(shù)語(yǔ)上的差別可能會(huì)導(dǎo)致輕微的混淆。線性代數(shù)中,如果一組向量互相垂直,這組向量就被認(rèn)為是正交基(orthogonal
basis)。它只要求所有向量互相垂直,并不要求所有向量都是單位向量。如果它們都是單位向量,則稱(chēng)它們?yōu)闃?biāo)準(zhǔn)正交基(orthogonal
basis)。這里所講的正交矩陣的行或列向量都是指標(biāo)準(zhǔn)正交基向量(orthogonal basis
vectors),所以由一組正交基向量構(gòu)造的矩陣并不一定是正交矩陣(除非基向量是標(biāo)準(zhǔn)正交的)。
矩陣正交化
有時(shí)可能會(huì)遇到略微違反了正交性的矩陣。例如,可能從外部得到了壞數(shù)據(jù),或者是浮點(diǎn)運(yùn)算的累積錯(cuò)誤(稱(chēng)作”矩陣爬行“)。這些情況下,需要做矩陣正交化,得到一個(gè)正交矩陣,這個(gè)矩陣要盡可能地和原矩陣相同(至少希望是這樣)。
構(gòu)造一組正交基向量(矩陣的行)的標(biāo)準(zhǔn)算法是施密特正交化。它的基本思想是,對(duì)每一行,從中減去它平行于已處理過(guò)的行的部分,最后得到垂直向量。
以3x3矩陣為例,和以前一樣,用r1、r2、r3代表3x3階矩陣M的行。正交向量組r1'、r2'、r3'的計(jì)算如公式9.9所示:
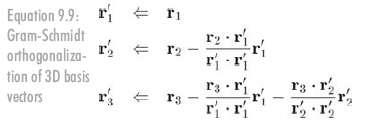
現(xiàn)在r1'、r2'、r3'互相垂直了,它們是一組正交基。當(dāng)然,它們不一定是單位向量。構(gòu)造正交矩陣需要使用標(biāo)準(zhǔn)正交基,所以必須標(biāo)準(zhǔn)化這些向量。注意,如果一開(kāi)始就進(jìn)行標(biāo)準(zhǔn)化,而不是在第2步中做,就能避免所有除法了。
施密特正交化是有偏差的,這取決于基向量列出的順序。一個(gè)明顯的例子是,r1總不用改變。該算法的一個(gè)改進(jìn)是不在一次正交化過(guò)程中將整個(gè)矩陣完全正交化。而是選擇一個(gè)小的因子k,每次只減去投影的k倍,而不是一次將投影全部減去。改進(jìn)還體現(xiàn)在,在最初的軸上也減去投影。這種方法避免了因?yàn)檫\(yùn)算順序不同帶來(lái)的誤差。算法總結(jié)如下:
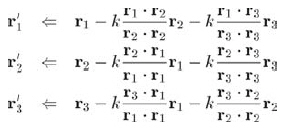
該算法的每次迭代都會(huì)使這些基向量比原來(lái)的基向量更為正交化,但可能不是完全正交的,多次重復(fù)這個(gè)過(guò)程,最終將得到一組正交基。要得到完美的結(jié)果,就得選擇一個(gè)適當(dāng)?shù)囊蜃觡并迭代足夠多次(如:10次)。接著,進(jìn)行標(biāo)準(zhǔn)化,最后就會(huì)得到一組正交基。