轉(zhuǎn)載自:
http://absolute.javaeye.com/blog/213872
又一篇學(xué)習(xí)筆記�,參考Mathematics for 3D Game Programming and Computer Graphics和ShaderX4上一篇關(guān)于tangent space計(jì)算的文章寫的東西�。對于計(jì)算時需要分裂頂點(diǎn)的內(nèi)容看的還不是太清楚-_-b�����。另外��,目前的算法還不能完美處理鏡像或者在紋理不連續(xù)處可能出現(xiàn)的問題,就算在Farcry中,很多問題也是通過美工來“隱藏”的���,再一次應(yīng)證了之前對美工重要性的結(jié)論^^。
算法:
Tangent space在Bump Map中有著重要作用,通常需要把燈光轉(zhuǎn)換到tangent space進(jìn)行計(jì)算�。對由參數(shù)方程計(jì)算出的規(guī)則曲面(比如,球體�,圓環(huán))來說��,很容易通過方程計(jì)算出tangent space,但對任意的三角形網(wǎng)格來說,則沒有那么簡單。
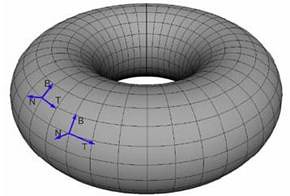
Tangent space是一個三維空間�。對3D空間中的一個頂點(diǎn)來說��,切空間的三條座標(biāo)軸分別對應(yīng)該點(diǎn)的法線N,切線T,和副法線(binormal)B��,顯然���,對不同的頂點(diǎn)來說�,切空間是不同的。那么在已知三角形三個頂點(diǎn)及其紋理坐標(biāo)的時候�,如何計(jì)算出N��,T,B呢�����?
目前已知的數(shù)據(jù)有三角形的三個頂點(diǎn)在世界坐標(biāo)中的位置: P0, P1,P2, 以及相應(yīng)的紋理坐標(biāo)在紋理空間中的位置C0 (U0,V0)����,C1,C2�����,則有:
P10 = P1 – P0����,
P20 = P2 - P1 ,
C10 = C1 – C0 = (U1-U0, V1-V0) = ( U10 ,V10)
C20 = C2 – C0.= (U2-U0, V2-V0) = ( U20 ,V20)
注意,P10在世界坐標(biāo)中的方向和C10在紋理空間中的方向是一致的(這一點(diǎn)確實(shí)比較抽象��,偶畫圖研究了好久才弄明白-_-)�,同樣,P20和C20也是如此��,發(fā)現(xiàn)這一點(diǎn)很重要�����,可以說是整個計(jì)算的基石��。進(jìn)一步來說,T��,B分別和紋理坐標(biāo)軸U��,V是平行的��。因此我們有:
P10 = U10T + V10B
P20 = U20T + V20B
把矢量展開得到:
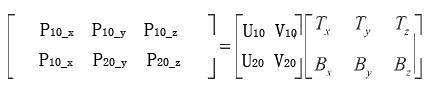
兩邊乘以[C10 C20]的逆矩陣,最后得到

法線N = T x B
這樣我們就得到了坐標(biāo)從切空間轉(zhuǎn)變到世界坐標(biāo)下的變換矩陣M = [ T B N ]���,當(dāng)然,更加常用的是M的逆矩陣����。注意�����,這里計(jì)算得出的只是面法線,如果需要計(jì)算每個頂點(diǎn)的法線�����,則應(yīng)該對共享該頂點(diǎn)的多個面的法線取均值��,求出結(jié)果��。
實(shí)現(xiàn):
ogre calculate tangent:
 Vector3 Math::calculateTangentSpaceVector(
Vector3 Math::calculateTangentSpaceVector(
const Vector3& position1, const Vector3& position2, const Vector3& position3,
Real u1, Real v1, Real u2, Real v2, Real u3, Real v3)


 {
{
 //side0 is the vector along one side of the triangle of vertices passed in,
//side0 is the vector along one side of the triangle of vertices passed in,
//and side1 is the vector along another side. Taking the cross product of these returns the normal.
Vector3 side0 = position1 - position2;
Vector3 side1 = position3 - position1;
//Calculate face normal
Vector3 normal = side1.crossProduct(side0);
normal.normalise();
//Now we use a formula to calculate the tangent.
Real deltaV0 = v1 - v2;
Real deltaV1 = v3 - v1;
Vector3 tangent = deltaV1 * side0 - deltaV0 * side1;
tangent.normalise();
//Calculate binormal
Real deltaU0 = u1 - u2;
Real deltaU1 = u3 - u1;
Vector3 binormal = deltaU1 * side0 - deltaU0 * side1;
binormal.normalise();
//Now, we take the cross product of the tangents to get a vector which
//should point in the same direction as our normal calculated above.
//If it points in the opposite direction (the dot product between the normals is less than zero),
//then we need to reverse the s and t tangents.
//This is because the triangle has been mirrored when going from tangent space to object space.
//reverse tangents if necessary
Vector3 tangentCross = tangent.crossProduct(binormal);
if (tangentCross.dotProduct(normal) < 0.0f)

 {
{
tangent = -tangent;
binormal = -binormal;
 }
}
return tangent;
 }
}