http://sighingnow.github.io/graphics/projection_and_camera.html
投影與相機空間
Published On August 14, 2015
計算機屏幕是2維的,OpenGL渲染的3D場景必須以2D形式的圖像投影到屏幕上。
透視投影
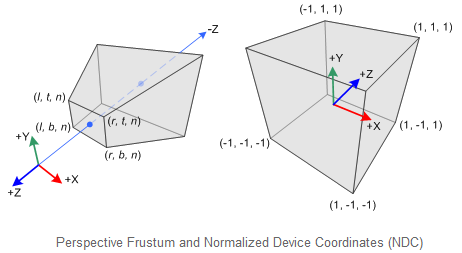
透視投影能較好的使二維投影顯示立體感,因為人眼觀看物體符合透視原理。首先,將所有頂點從眼坐標(照相機坐標)轉換到裁剪坐標系下。然后,這些裁剪坐標通過透視除法,即除以裁剪坐標中w分量,轉換到歸一化設備坐標系(NDC)。在透視投影中,在眼坐標下截頭椎體(a truncated pyramid frustum)內的3D點被映射到NDC下一個立方體中;x坐標從[l,r]映射到[-1,1],y坐標從[b,t]映射到[-1,1],z坐標從[n,f]映射到[-1,1]。
世界坐標和眼坐標系使用右手坐標系,而NDC使用左手坐標系。這就是說,眼坐標系下,在原點處的照相機朝著-Z軸看去,但是在NDC中它朝著+Z軸看去。如下圖所示:
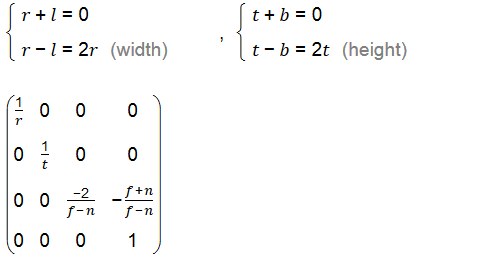
由幾何關系,可以推導出對稱視錐(常見的都是對稱視錐,也符合人眼看物理的規律)的投影變換矩陣如下:
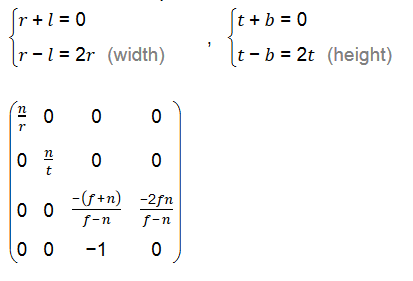
其中,n為眼睛與近平面的距離(near),f為眼睛與遠平面的距離(far),r為設備的寬度,t為設備的高度。
如何定義視界角度為alpha,定義設備的寬高比為 ar = width/height, 那么,投影矩陣也可以表述為:
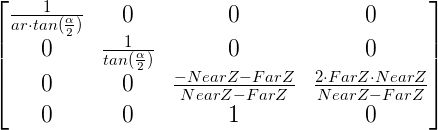
對應的代碼實現:
PipeLine & PipeLine::PerspectiveProject(float ar, float alpha, float znear, float zfar) { mat4x4f PrespectiveM = { 1.0f/(tanf(alpha/2.0)*ar), 0.0f , 0.0f , 0.0f, 0.0f , 1.0f/(tanf(alpha/2.0)), 0.0f , 0.0f, 0.0f , 0.0f , (-znear-zfar)/(znear-zfar), (2*zfar*znear)/(znear-zfar), 0.0f , 0.0f , 1.0f , 0.0f }; mulmatf(PrespectiveM, M, M, 4, 4, 4); return *this; }
投影變換對應的矩陣稱為投影(projection)矩陣。
正交投影
構造正交投影(Orithographic Projection)的矩陣簡單很多。所有的是眼坐標下xe, ye 和ze,都被線性的映射到NDC中。我們需要做的就是講長方體視景體縮放為規范視見體,然后移動到原點。如下圖所示:
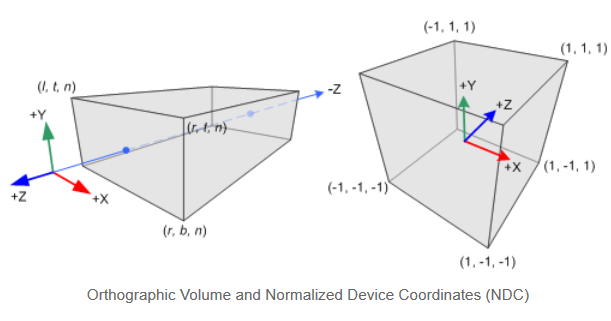
如果視錐是對稱的話,投影矩陣為:
相機空間
我們可以將相機放在三維空間的任意位置,然后將世界坐標系中的點轉換到相機坐標系中,然后投影到設備屏幕上。理論上可以生成這樣的變化矩陣,實現把一個位于3D空間的對象投影到坐落在世界坐標系任意位置的相機正前方的2D平面上。
三維相機的一個示意圖:
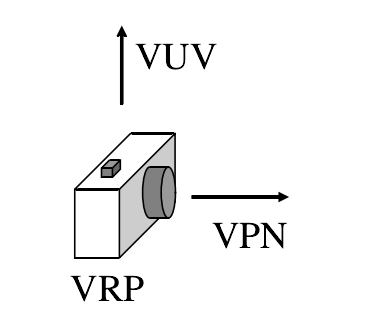
與UVN相關的概念包括:
- 相機位置,或者叫做視點(eyepoint): 觀察參考點 (View Reference Point)
- 相機鏡頭方向,通過觀察平面的法向量指定: 觀察平面法向量VPN (View Plane Normal)
- 相機頂部正朝向: VUV (View Up Vector)
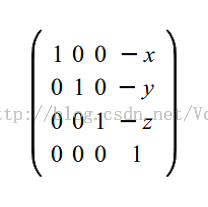
相機平移變換
移動相機是非常簡單的。如果相機位于(x,y,z),那么平移變換就是(-x,-y,-y)。原因很明顯——相機在世界坐標系下用向量(x,y,z)做平移變換,所以想要相機回到原點,那么我們就需要使用此向量的相反向量進行平移。變換矩陣如下所示:
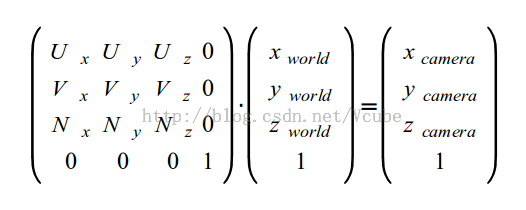
相機旋轉變換
下一步是將相機轉向世界坐標系中指定的位置。我們想要找到在相機定義的新坐標系下頂點的位置。“UVN相機”是眾多指定相機方向的辦法中的一個。相機被下列的矩陣所定義:
- N: 由相機指向它的目標的向量。在一些3D的文獻中也被稱為’look at’。這個向量對應于Z軸。
- V: 直立時,這個向量相對于相機是豎直向上的。這個向量對應于Y軸。
- U: 這個向量從相機指向其右側。它對應于X軸。
為了把一個位置從世界坐標系空間轉換到被UVN向量定義的相機坐標系空間,我們需要在位置和UVN向量之間進行一個點乘運算。我們可以把UVN系統看作是相機的基,從而可以方便的把一個向量在世界坐標和相機坐標進行轉換(將世界坐標變換到相機坐標)。得到的相機旋轉變換矩陣:
下來討論這個變換矩陣的推導過程。對于一個相機,我們容易知道它在三維坐標(世界坐標系)中的以下三個參數:
- pos: 相機的位置坐標。
- target: 相機正前方的目標點的坐標。
- up: 相機的正上方(頭頂)的方向向量。(一般為(0.0f, 1.0f, 0.0f),與人平視屏幕時的頭頂方向一致)。
根據這三個參數,注意到相機坐標系是右手坐標系,根據向量叉積的性質,容易求出:
N = norm(target - pos) U = norm(up * N) V = norm(N * U)
當相機在屏幕中定位時,它首先會進行朝向的確定——旋轉,然后進行位置的確定——平移。因此,當進行相機變換的時候,將世界坐標系中的坐標變換到相機坐標系中的坐標時,應該進行一個相機定位的逆定位。先做逆平移變換,再做逆旋轉變換。
關于相機變換矩陣的推導,參考了博文[推導相機變換矩陣][http://blog.csdn.net/popy007/article/details/5120158]。
相機變換對應的矩陣稱為視圖(view)矩陣,也稱為觀察矩陣。
數學運算庫 glm 中包含了一個lookUp函數,可以根據pos, target和up三個向量來直接計算出相機變換矩陣:
glm::mat4 View = glm::lookAt( glm::vec3(4,3,3), // Camera is at (4,3,3), in World Space glm::vec3(0,0,0), // and looks at the origin glm::vec3(0,1,0) // Head is up (set to 0,-1,0 to look upside-down) );
攝像機控制
通過相機變換矩陣,我們可以利用矩陣乘法將世界坐標系中的坐標變換到相機坐標系中。通過修改pos, target 和 up 參數,我們可以在程序中動態完成相機的控制。但是這樣仍然不能很好的用于人機交互,通常使用的第一人稱相機,通過鍵盤WASD等鍵和鼠標來控制虛擬相機更加方便,因此需要改進我們的相機控制。要想構造適合人機交互的相機類,必須明確我們需要實現的目標。第一人稱相機的目標包括:鍵盤來移動相機,是相機前后左右移動,通過鼠標來控制相機繞xy軸轉動角度,通過鼠標滾輪來實現縮放。
第一人稱相機旋轉示意圖:
可以將相機在空間的旋轉、移動等變換都分解到 U、V、N 方向上進行,三個為了更好地表達對攝像機的控制,實現一個Camera類,代碼實現:
// implements for class Camera Camera::Camera(vec3f pos, vec3f target, vec3f up): POS(pos), TARGET(target), UP(up) { // initial camera. POS = pos; TARGET = target; UP = up; this->UpdateUVN(); } Camera & Camera::Translate(float du, float dv, float dn) { vec3f delta(du*U.x + dv*V.x + dn*N.x, du*U.y + dv*V.y + dn*N.y, du*U.z + dv*V.z + dn*N.z); POS = POS + delta; TARGET = TARGET + delta; return this->UpdateUVN(); } Camera & Camera::Rotate(float roll, float pitch, float yaw) { vec3f uu, vv, nn; uu = U, vv = V; U = uu * cosf(roll) - vv * sinf(roll); V = uu * sinf(roll) + vv * cosf(roll); vv = V, nn = N; V = vv * cosf(pitch) - nn * sinf(pitch); N = vv * sinf(pitch) + nn * cosf(pitch); // nn = N, uu = U; N = nn * cosf(yaw) - uu * sinf(yaw); U = nn * sinf(yaw) + uu * cosf(yaw); // update target and up. TARGET = POS + N; UP = V; return *this; } Camera & Camera::UpdateUVN() { // calculate the axis value of camera coordinate system. N = (TARGET - POS).Normalize(); U = (UP * N).Normalize(); V = (U * N).Normalize(); return *this; } mat4x4f & Camera::TransformM() { memset(M, 0x00, sizeof(M)); M[0][0] = M[1][1] = M[2][2] = M[3][3] = 1.0f; // calculate translation transform. mat4x4f TranslateM = { 1.0f, 0.0f, 0.0f, -POS.x, 0.0f, 1.0f, 0.0f, -POS.y, 0.0f, 0.0f, 1.0f, -POS.z, 0.0f, 0.0f, 0.0f, 1.0f }; mulmatf(TranslateM, M, M, 4, 4, 4); // calculate rotation transform. mat4x4f RotateM = { U.x , U.y , U.z , 0.0f, V.x , V.y , V.z , 0.0f, N.x , N.y , N.z , 0.0f, 0.0f, 0.0f, 0.0f, 1.0f }; mulmatf(RotateM, M, M, 4, 4, 4); return this->M; }
方向鍵控制六個方向上的移動:
static void SpecialKeys(int key, int, int) { switch (key) { case GLUT_KEY_LEFT: camera.Translate(-STEP_VAL); break; case GLUT_KEY_RIGHT: camera.Translate(STEP_VAL); break; case GLUT_KEY_UP: camera.Translate(0.0f, STEP_VAL); break; case GLUT_KEY_DOWN: camera.Translate(0.0f, -STEP_VAL); break; case GLUT_KEY_PAGE_UP: camera.Translate(0.0f, 0.0f, STEP_VAL); break; case GLUT_KEY_PAGE_DOWN: camera.Translate(0.0f, 0.0f, -STEP_VAL); break; default: printf("Unknown Special Key: %d\n", key); break; } }
鼠標拖拽:
glutMotionFunc(MotionFunc); glutMouseFunc(MouseFunc); static void MotionFunc(int x, int y) { if(mstate) { camera.Rotate(0.0f, ToRadian((_y-y)*Camera::MOUSE_SENSITIVITY), ToRadian((_x-x)*Camera::MOUSE_SENSITIVITY)); _x = x; _y = y; // update } } static void MouseFunc(int button, int state, int x, int y) { if(button == GLUT_LEFT_BUTTON) { if(state == GLUT_DOWN) { _x = x, _y = y; mstate = true; } else { mstate = false; } } }
MVP變換矩陣
M、V、P 分別指模型(model),視圖(view)和投影(projection)。MVP矩陣是模型、視圖、以及投影變換三者結合起來的變換矩陣。變換順序為:模型 -> 視圖 -> 投影。變換方程表達:
MVP = model * view * projection MVPTransform = model * view * projection * origin
在實際編程中,可以使用glm庫來方便地實現這些操作:
// Projection matrix : 45° Field of View, 4:3 ratio, display range : 0.1 unit <-> 100 units glm::mat4 Projection = glm::perspective(45.0f, 4.0f / 3.0f, 0.1f, 100.0f); // Camera matrix glm::mat4 View = glm::lookAt( glm::vec3(4,3,3), // Camera is at (4,3,3), in World Space glm::vec3(0,0,0), // and looks at the origin glm::vec3(0,1,0) // Head is up (set to 0,-1,0 to look upside-down) ); // Model matrix : an identity matrix (model will be at the origin) glm::mat4 Model = glm::mat4(1.0f); // Changes for each model ! // Our ModelViewProjection : multiplication of our 3 matrices glm::mat4 MVP = Projection * View * Model; // Remember, matrix multiplication is the other way around
深度緩沖(Z-Buffer)
在OpenGL繪圖過程中,我們會遇到這樣的問題:一些理應被遮擋的面,因為繪制次序靠后,竟然變成可見的了。我們將用深度緩沖(Z-Buffer)算法解決它。
該問題的解決方案是:在緩沖中存儲每個片段的深度(即“Z”值);并且每次繪制片段之前要比較當前與先前片段的深度值,看誰離攝像機更近。
我們可以自己實現深度緩沖,但讓硬件自動完成更簡單:
// Enable depth test glEnable(GL_DEPTH_TEST); // Accept fragment if it closer to the camera than the former one glDepthFunc(GL_LESS);
問題解決了。
參考
- 深入投影變換
- OpenGL學習腳印: 投影矩陣的推導
- 推導相機變換矩陣