kalman濾波器聽著很深奧的一個東東,其實一點不難。
我理解的kalman濾波就是通過為對象建立一個特定模型(例如直線勻速運動),來糾正實際觀測到的物體運動軌跡到我們認為的運動模型中。
其特點就是隨著時間的推移,物體的實際軌跡會逐漸趨近于真實軌跡(與建立的運動模型越來越吻合)。
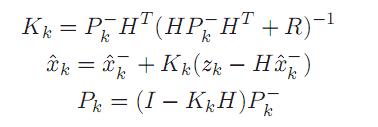
一個離散的kalman濾波器可以用2個方程來表示:
時間更新方程:
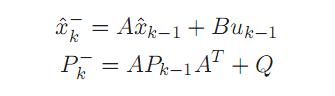
空間更新方程:
其中幾個參數的細微調節會影響整個濾波器的性能。可以通過嘗試去調節參數值。
詳細介紹參看:
http://www.cs.unc.edu/~welch/kalman/c++實現的代碼如下:
kalman.h
 #ifndef __KALMAN_H__
#ifndef __KALMAN_H__
#define __KALMAN_H__
#include "Matrix.h"
//discrete kalman filter
class CKalman


 {
{
 public:
public:
CKalman();
~CKalman();
public:

 /**//**************Init the param********************/
/**//**************Init the param********************/
void SetA(CMatrix *pm);
void SetB(CMatrix *pm);
void SetH(CMatrix *pm);
void SetQ(CMatrix *pm);
void SetR(CMatrix *pm);
/**//*****************Input variable******************/
void InputX0(CMatrix *pm);
void InputP0(CMatrix *pm);
void InputUkprev(CMatrix *pm);
void InputZk(CMatrix *pm);
void AssertParam();
public:
//time refresh equation
void RefreshTimeVar();
//status refresh equation
void RefreshStatus();
void OutputResult(double *p);
private:
CMatrix *m_pA; //state plus matrix A
CMatrix *m_pB; //control plus matrix B
CMatrix *m_pPkPriori; //Priori estimation Pk-
CMatrix *m_pPkPosteriori; //Posteriori estimation Pk
CMatrix *m_pPkprev; //Posteriori estimation Pk-1
CMatrix *m_pH;
CMatrix *m_pK; //kalman plus matrix
CMatrix *m_pQ;
CMatrix *m_pR;
CMatrix *m_pXkprev; //Xk-1
CMatrix *m_pXkPriori; //Priori estimation Xk-
CMatrix *m_pXkPosteriori; //Posteriori estimation Xk
CMatrix *m_pUkprev; //control variable;
CMatrix *m_pZk; //observation variable;
bool m_bHasControlVarible;
 };
};
#endif
kalman.cpp:
#include "kalman.h"
#include <assert.h>
CKalman::CKalman()
{
m_pXkprev = NULL;
m_pXkPriori = NULL;
m_pXkPosteriori = NULL;
m_pUkprev = NULL;
m_pZk = NULL;
m_pA = NULL;
m_pB = NULL;
m_pPkPriori = NULL;
m_pPkPosteriori = NULL;
m_pPkprev = NULL;
m_pH = NULL;
m_pK = NULL;
m_pQ = NULL;
m_pR = NULL;
m_bHasControlVarible = false;
}
CKalman::~CKalman()
{
if (NULL != m_pPkPriori)
{
delete m_pPkPriori;
 }
}
if (NULL != m_pPkPosteriori)
{
delete m_pPkPosteriori;
}
if (NULL != m_pXkPriori)
{
delete m_pXkPriori;
}
if (NULL != m_pXkPosteriori)
{
delete m_pXkPosteriori;
}
}
void CKalman::SetA(CMatrix *pm)
{
m_pA = pm;
}
void CKalman::SetB(CMatrix *pm)
{
m_pB = pm;
}
void CKalman::SetH(CMatrix *pm)
{
m_pH = pm;
}
void CKalman::SetQ(CMatrix *pm)
{
m_pQ = pm;
}
void CKalman::SetR(CMatrix *pm)
{
m_pR = pm;
}
void CKalman::AssertParam()
{
assert(NULL != m_pXkprev);
assert(NULL != m_pZk);
assert(NULL != m_pA);
assert(NULL != m_pPkprev);
assert(NULL != m_pH);
assert(NULL != m_pQ);
assert(NULL != m_pR);
if (m_bHasControlVarible)
{
assert(NULL != m_pUkprev);
assert(NULL != m_pB);
}
}
void CKalman::InputX0(CMatrix *pm)
{
m_pXkprev = pm;
long nWidth = m_pXkprev->getWidth();
long nHeight = m_pXkprev->getHeight();
m_pXkPriori = new CMatrix(NULL, nWidth, nHeight);
m_pXkPosteriori = new CMatrix(NULL, nWidth, nHeight);
}
void CKalman::InputP0(CMatrix *pm)
{
m_pPkprev = pm;
long nWidth = m_pPkprev->getWidth();
long nHeight = m_pPkprev->getHeight();
m_pPkPriori = new CMatrix(NULL, nWidth, nHeight);
m_pPkPosteriori = new CMatrix(NULL, nWidth, nHeight);
}
void CKalman::InputUkprev(CMatrix *pm)
{
if (NULL == pm)
{
m_bHasControlVarible = false;
}
else
{
m_bHasControlVarible = true;
m_pUkprev = pm;
}
}
void CKalman::InputZk(CMatrix *pm)
{
m_pZk = pm;
}
void CKalman::RefreshTimeVar()
{
AssertParam();
if (m_bHasControlVarible)
{
*m_pXkPriori = (*m_pA)*(*m_pXkprev) + (*m_pB)*(*m_pUkprev); //1.9
}
else
{
*m_pXkPriori = (*m_pA)*(*m_pXkprev);
}
*m_pPkPriori = (*m_pA)*(*m_pPkprev)*(m_pA->Transpose()) + (*m_pQ); //1.10
}
void CKalman::RefreshStatus()
{
assert(NULL != m_pZk);
CMatrix mPH;
mPH = (*m_pPkPriori) * (m_pH->Transpose());
CMatrix mTmp;
((*m_pH) * mPH + (*m_pR)).GetInverse(mTmp);
long nHeight = mPH.getHeight();
long nWidth = mTmp.getWidth();
CMatrix mK(NULL, nWidth, nHeight);
m_pK = &mK;
*m_pK = mPH * mTmp; //1.11
*m_pXkPosteriori = *m_pXkPriori + (*m_pK) * (*m_pZk - (*m_pH)*(*m_pXkPriori)); //1.12
CMatrix mUnit(m_pK->getHeight());
*m_pPkPosteriori = (mUnit - (*m_pK)*(*m_pH))*(*m_pPkPriori); //1.13
//recursion
m_pPkprev = m_pPkPosteriori;
m_pXkprev = m_pXkPosteriori;
m_pZk = NULL;
}
void CKalman::OutputResult(double *p)
{
m_pXkPosteriori->GetValue(p);
}
其中的matrix實現代碼可以參考我以前的文章。
懶了就寫到這兒吧
posted on 2011-01-05 15:20
saha 閱讀(683)
評論(0) 編輯 收藏 引用