5.3 移動(dòng)操作
本節(jié)介紹三種移動(dòng)PTZ單元操作,絕對(duì)、相對(duì)或移動(dòng)。所有操作都需要profile token,引用PTZ配置中的Media Profile。
所有移動(dòng)命令應(yīng)以非阻塞方式執(zhí)行,表示不應(yīng)等到請(qǐng)求的移動(dòng)操作完成。新的移動(dòng)請(qǐng)求可以覆蓋最后的移動(dòng)操作。
由于本規(guī)范涉及的物理設(shè)備范圍廣泛,因此本規(guī)范不要求對(duì)PTZ移動(dòng)操作的特定相應(yīng)時(shí)間。但是設(shè)備應(yīng)盡量減少PTZ移動(dòng)命令響應(yīng)的延遲。設(shè)備沒(méi)有完全控制PTZ控制輸入和設(shè)備移動(dòng)的滯后。網(wǎng)絡(luò)與客戶端的延遲會(huì)增加滯后。實(shí)現(xiàn)應(yīng)該盡快減少設(shè)備的延遲。
5.3.1. 絕對(duì)移動(dòng)(AbsoluteMove)
如果PTZ節(jié)點(diǎn)支持絕對(duì)水平/俯仰或絕對(duì)變焦的移動(dòng),則應(yīng)支持絕對(duì)移動(dòng)操作。這個(gè)命令的位置參數(shù)指定PTZ單元要移動(dòng)的絕對(duì)位置。它分為一個(gè)可選的水平/俯仰元素和一個(gè)可選的變焦元素。如果忽略了水平/俯仰位置,則當(dāng)前的水平/俯仰運(yùn)動(dòng)不受此命令的影響。變焦也是同樣的原理。
PTZ節(jié)點(diǎn)支持的絕對(duì)位置空間,如果省略了空間信息,則PTZ配置的相應(yīng)的默認(rèn)空間,采用指定控件的媒體屬性。設(shè)備僅為有絕對(duì)位置空間提供支持絕對(duì)水平/俯仰或變焦的服務(wù)。現(xiàn)有的移動(dòng)操作命令中的速度參數(shù)比PTZ配置中的默認(rèn)速度優(yōu)先級(jí)要高。如果空間引用了速度參數(shù),那么需要支持PTZ節(jié)點(diǎn)支持的速度空間。
如果無(wú)法達(dá)到所要求的絕對(duì)位置,操作將失敗。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• Position [tt:PTZVector]
指定絕對(duì)目標(biāo)位置的矢量
• Speed – 可選[tt:PTZSpeed]
可選速度矢量
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Sender - ter:InvalidArgVal - ter:SpaceNotSupported
引用了PTZ節(jié)點(diǎn)不支持的空間。
• env:Sender - ter:InvalidArgVal - ter:InvalidPosition
請(qǐng)求的位置超出了界限。
• env:Sender - ter:InvalidArgVal - ter:InvalidSpeed
請(qǐng)求的速度超出了界限。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.2. 相對(duì)移動(dòng)(RelativeMove)
如果PTZ節(jié)點(diǎn)支持相對(duì)水平/俯仰或相對(duì)變焦移動(dòng),則需要支持相對(duì)移動(dòng)(RelativeMove)操作。此操作的轉(zhuǎn)換參數(shù)指定當(dāng)前位置與要移動(dòng)的位置的插值。該操作可分為一個(gè)可選的水平/俯仰元素和一個(gè)可選的變焦參數(shù)。如果水平/俯仰忽略掉了,那么當(dāng)前的水平/俯仰位置不會(huì)受此命令的影響。變焦元素也同樣。
轉(zhuǎn)換元素中引用的空間應(yīng)該為PTZ節(jié)點(diǎn)支持的轉(zhuǎn)換空間。如果轉(zhuǎn)換參數(shù)的空間信息忽略掉了,那么將根據(jù)PTZ配置的默認(rèn)空間。設(shè)備需要支持相對(duì)水平/俯仰移動(dòng),相對(duì)變焦移動(dòng)或不支持相對(duì)運(yùn)動(dòng)。
在請(qǐng)求移動(dòng)的命令中攜帶的速度參數(shù)優(yōu)先于PTZ配置中的默認(rèn)速度。如果空間引用了速度參數(shù),則PTZ節(jié)點(diǎn)需要支持速度空間。
通過(guò)發(fā)送水平/俯仰和變焦0值命令可以在當(dāng)前位置停止PTZ單元。停止應(yīng)具有與引用相對(duì)空間完全相同的效果。
如果請(qǐng)求轉(zhuǎn)換后的絕對(duì)位置是無(wú)法到達(dá)的,那么PTZ節(jié)點(diǎn)需要移動(dòng)最接近的有效位置。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• Translation [tt:PTZVector]
指定相對(duì)于當(dāng)前位置的位置平移的向量
• Speed – 可選[tt:PTZSpeed]
可選速度矢量
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Sender - ter:InvalidArgVal - ter:SpaceNotSupported
引用了PTZ節(jié)點(diǎn)不支持的空間。
• env:Sender - ter:InvalidArgVal - ter:InvalidTranslation
請(qǐng)求的轉(zhuǎn)換超出了界限。
• env:Sender - ter:InvalidArgVal - ter:InvalidSpeed
請(qǐng)求的速度超出了界限。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.3. 連續(xù)移動(dòng)(ContinuousMove)
具有PTZ功能的設(shè)備應(yīng)支持連續(xù)移動(dòng)。此命令的速度參數(shù)為水平/俯仰和縮放指定的有符號(hào)的速度值。組合的水平/俯仰元素及變焦元素也是可選的。如果水平/俯仰元素忽略掉了,當(dāng)前的水平/俯仰元素則不受此命令的影響。變焦元素也是如此。引用有速度元素的空間的PTZ節(jié)點(diǎn)需要支持速度空間。如果速度參數(shù)忽略掉了空間信息,那么采用相應(yīng)的指定媒體文件的PTZ配置的默認(rèn)空間。設(shè)備通過(guò)僅為支持的情況提供速度空間來(lái)支持連續(xù)水平/俯仰移動(dòng)和連續(xù)變焦動(dòng)作。
當(dāng)前移動(dòng)操作的超時(shí)參數(shù)優(yōu)先于相應(yīng)PTZ配置的默認(rèn)超時(shí)參數(shù)。超時(shí)參數(shù)決定PTZ節(jié)點(diǎn)的連續(xù)移動(dòng)的時(shí)間。
當(dāng)0作為該軸的連續(xù)移動(dòng)參數(shù)時(shí),設(shè)備應(yīng)停止在特定軸(水平,俯仰或變焦)的移動(dòng)。引用的速度空間也應(yīng)有獨(dú)立的停止功能。這個(gè)命令在連續(xù)移動(dòng)的影響與在5.3.5節(jié)中的停止命令是一樣的。
請(qǐng)求的速度得到的絕對(duì)位置是不能到達(dá)的,則PTZ節(jié)點(diǎn)應(yīng)移動(dòng)到最接近的能到達(dá)的位置。連續(xù)移動(dòng)操作的典型應(yīng)用是通過(guò)操縱桿控制PTZ。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• Velocity [tt:PTZSpeed]
速度矢量指定水平,俯仰和變焦的速度。
• Timeout– 可選[tt:duration]
可選超時(shí)
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Sender - ter:InvalidArgVal - ter:SpaceNotSupported
引用了PTZ節(jié)點(diǎn)不支持的空間。
• env:Sender - ter:InvalidArgVal - ter:InvalidTranslation
請(qǐng)求的轉(zhuǎn)換超出了界限。
• env:Sender - ter:InvalidArgVal - ter:TimeoutNotSupported
指定的超時(shí)參數(shù)不在支持的超時(shí)時(shí)間范圍內(nèi)。
• env:Sender - ter:InvalidArgVal - ter:InvalidSpeed
請(qǐng)求的速度超出了界限。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.4. 地理移動(dòng)(GeoMove)
設(shè)備有GeoMove信號(hào),則PTZ節(jié)點(diǎn)需要支持這類命令。
可選的AreaHeight和AreaWidth參數(shù)可以添加到參數(shù)中,所以PTZ設(shè)備可以決定變焦因子。如果沒(méi)有提供AreaHeight和AreaWidth,該單元將不會(huì)更改變焦。AreaHeight和AreaWidth用米來(lái)表示。
請(qǐng)求的轉(zhuǎn)換過(guò)程中的速度參數(shù)優(yōu)先于相應(yīng)的PTZ配置的默認(rèn)速度。如果引用的空間含有速度參數(shù),那么PTZ節(jié)點(diǎn)應(yīng)支持速度空間。
如果PTZ設(shè)備不支持自動(dòng)檢索地理位置,那么在執(zhí)行地理引用命令之前使用SetGeoLocation進(jìn)行設(shè)置。客戶端如果在設(shè)備設(shè)置地理位置之前發(fā)送GeoMove命令,設(shè)備應(yīng)返回一個(gè)錯(cuò)誤。
取決于PTZ設(shè)備的運(yùn)動(dòng)方式,請(qǐng)求的位置可能無(wú)法到達(dá)。這種情況下設(shè)備應(yīng)返回一個(gè)錯(cuò)誤,表示由于物理限制無(wú)法執(zhí)行請(qǐng)求的操作。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• Target [tt:GeoLocation]
目標(biāo)坐標(biāo)。
• Speed – 可選[tt:PTZSpeed]
指定水平,俯仰和變焦的速度矢量。
• AreaWidth – 可選[xs:float]
要顯示的可選區(qū)域。
• AreaHeight – 可選[xs:float]
要顯示的可選區(qū)域。
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Sender - ter:InvalidArgVal - ter:GeoMoveNotSupported
設(shè)備不支持地理移動(dòng)。
• env:Sender - ter:InvalidArgVal - ter:UnreachablePosition
請(qǐng)求的轉(zhuǎn)換超出了界限。
• env:Sender - ter:InvalidArgVal - ter:TimeoutNotSupported
指定的超時(shí)參數(shù)不在支持的超時(shí)時(shí)間范圍內(nèi)。
• env:Sender - ter:InvalidArgVal - ter:GeoLocationUnknown
由于地理位置未配置或不可用,該單元無(wú)法執(zhí)行GeoMove。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.5. 停止(Stop)
PTZ設(shè)備需支持停止操作。如果沒(méi)有指定停止的參數(shù),那么這個(gè)命令將停止所有正在進(jìn)行的水平,俯仰和變焦動(dòng)作。通過(guò)指定相應(yīng)的停止參數(shù)可以停止對(duì)應(yīng)的操作。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• PanTilt – 可選[xs:boolean]
停止水平和俯仰操作(默認(rèn)為true)。
• Zoom – 可選[xs:boolean]
停止變焦操作(默認(rèn)為true)。
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.6. 移動(dòng)并開(kāi)始跟蹤(MoveAndStartTracking)
設(shè)備PTZ節(jié)點(diǎn)有MoveAndTrack時(shí)應(yīng)該支持這個(gè)命令。這個(gè)操作的目的是向設(shè)備發(fā)送一個(gè)自動(dòng)命令:移動(dòng)攝像機(jī)到想要的位置然后通過(guò)追蹤算法代理PTZ操作。使用原子命令,延遲被最小化。移動(dòng)位置是可選的且可以按照三種模式進(jìn)行設(shè)置:
• 通過(guò)地理位置坐標(biāo)
• 通過(guò)預(yù)置位token
• 通過(guò)PTZVector位置
請(qǐng)求位置移動(dòng)的的速度參數(shù)優(yōu)先于相應(yīng)的PTZ配置的默認(rèn)速度。如果引用空間含有速度參數(shù),那么PTZ節(jié)點(diǎn)需支持速度空間。
如果在同一個(gè)設(shè)備中完成了偵察和追蹤,那么ObjectID引用可以作為參數(shù),以指定應(yīng)跟蹤哪個(gè)對(duì)象。
請(qǐng)求的絕對(duì)位置設(shè)備無(wú)法到達(dá),則操作將失敗。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
• GeoLocation – 可選 [tt:GeoLocation]
可選目標(biāo)坐標(biāo)。
• PresetToken – 可選[tt:ReferenceToken]
對(duì)一個(gè)存在的預(yù)置位token的可選應(yīng)用。
• TargetPosition – 可選[tt:PTZVector]
指定絕對(duì)目標(biāo)位置的可選向量。
• Speed – 可選[tt:PTZSpeed]
可選速度矢量。
• ObjectID – 可選[tt:ObjectID]
要跟蹤對(duì)象的可選Object ID。
響應(yīng)(RESPONSE): 空消息
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Sender - ter:InvalidArgVal - ter:SpaceNotSupported
引用了PTZ節(jié)點(diǎn)不支持的空間。
• env:Sender - ter:InvalidArgVal - ter:InvalidPosition
請(qǐng)求的位置超出了界限。
• env:Sender - ter:InvalidArgVal - ter:InvalidSpeed
請(qǐng)求的速度超出了界限。
• env:Sender - ter:InvalidArgVal - ter:GeoMoveNotSupported
設(shè)備不支持地理移動(dòng)。
• env:Sender - ter:InvalidArgVal - ter:UnreachablePosition
請(qǐng)求的轉(zhuǎn)換超出了界限。
• env:Sender - ter:InvalidArgVal - ter:GeoLocationUnknown
由于地理位置未配置或不可用,該單元無(wú)法執(zhí)行GeoMove。
• env:Sender - ter:InvalidArgVal - ter:NoToken
請(qǐng)求的預(yù)置位token不存在。
訪問(wèn)權(quán)限類(ACCESS CLASS):
ACTUATE
5.3.7. 狀態(tài)獲取(GetStatus)
PTZ設(shè)備需支持通過(guò)GetStatus命令報(bào)告PTZ狀態(tài)。PTZ狀態(tài)包含以下信息:
• 位置Position (可選) – 引用空間指定云臺(tái)單元的絕對(duì)位置。相應(yīng)PTZ配置的默認(rèn)絕對(duì)空間應(yīng)在位置元素中引用。如果設(shè)備有StatusPosition能力,則需要顯示此信息。
• 移動(dòng)狀態(tài)MoveStatus(可選) – 表示水平/俯仰/變焦設(shè)備單元當(dāng)前是否正在移動(dòng)、空閑或處于位置狀態(tài)。如果設(shè)備有MoveStatus能力,則需要顯示此信息。未知狀態(tài)不應(yīng)在正常錯(cuò)誤中使用,但是在初始化或錯(cuò)誤狀況下使用。
• 錯(cuò)誤Error (可選) – 表示當(dāng)前PTZ錯(cuò)誤狀態(tài)。MoveStatus未知狀態(tài)時(shí),顯示這個(gè)字段。
• 國(guó)際標(biāo)準(zhǔn)時(shí)間 UTC Time – 指定生成狀態(tài)時(shí)的UTC時(shí)間。
請(qǐng)求(REQUEST):
• ProfileToken [tt:ReferenceToken]
對(duì)現(xiàn)有媒體配置文件的引用
響應(yīng)(RESPONSE): 空消息
• PTZStatus[tt:PTZStatus]
請(qǐng)求媒體文件的PTZStatus。
錯(cuò)誤(FAULTS):
• env:Sender - ter:InvalidArgVal - ter:NoProfile
請(qǐng)求的配置文件token內(nèi)ProfileToken不存在。
• env:Sender - ter:InvalidArgVal - ter:NoPTZProfile
請(qǐng)求的配置文件token未引用PTZ配置。
• env:Receiver – ter:Action - ter:NoStatus
請(qǐng)求的媒體配置文件中沒(méi)有可用的PTZ狀態(tài)。
訪問(wèn)權(quán)限類(ACCESS CLASS):
READ_MEDIA
posted @
2021-06-19 20:38 canaan 閱讀(2568) |
評(píng)論 (0) |
編輯 收藏
摘要:
5.
服務(wù)
5.1
PTZ節(jié)點(diǎn)
5.1.1.
常規(guī)
支持PTZ的設(shè)備可以有多個(gè)PTZ節(jié)點(diǎn)。PTZ節(jié)點(diǎn)可以表示機(jī)械PTZ驅(qū)動(dòng)器。上傳的云臺(tái)驅(qū)動(dòng)程序或數(shù)字...
閱讀全文
posted @
2021-06-17 16:34 canaan 閱讀(1626) |
評(píng)論 (0) |
編輯 收藏
摘要: 1.
范圍
本文檔定義了用于配置和操作云臺(tái)變焦控制器的web服務(wù)接口。此外,還定義了相關(guān)事件。
Web服務(wù)的使用不在本文檔的范圍內(nèi)。請(qǐng)參考ONVIF核心規(guī)范。
2.
引用標(biāo)準(zhǔn)
ONVIF核心規(guī)范
<http://www...
閱讀全文
posted @
2021-06-16 21:59 canaan 閱讀(1853) |
評(píng)論 (0) |
編輯 收藏
縱觀歷史,一代代偉人,哲學(xué)家,或是帝國(guó);
曾經(jīng)的波斯帝國(guó),你在哪里?
曾經(jīng)的亞歷山大,又去了何方,是否也漸漸被人遺忘?
埃及艷后,伊麗莎白,你們的名氣雖大,但終歸已是塵土。
橫看世界,地球你在太陽(yáng)系中算小的;
太陽(yáng)系你在銀河系中又是怎樣的地位?
銀河系啊,你在宇宙中又占哪個(gè)位置?
人啊,你在地球上可以算是一個(gè)管理者。
你今日為房子勞碌而委屈了自己,你自己有想過(guò)嗎?
你昨日因?yàn)橐患∈露鴲瀽炆鷼猓趾伪啬兀?br/>
我不知是明天太陽(yáng)先升起,還是意外先來(lái)臨。
曾經(jīng)你相信生活不止眼前的茍且,現(xiàn)在還相信還有詩(shī)和遠(yuǎn)方的田野嗎?
你是否將自己局限在自己想象的框架中了呢?
c#與C++類型轉(zhuǎn)換,網(wǎng)摘2011-12-08 8:33//c++:HANDLE(void *) ---- c#:System.IntPtr
//c++:Byte(unsigned char) ---- c#:System.Byte
//c++:SHORT(short) ---- c#:System.Int16
//c++:WORD(unsigned short) ---- c#:System.UInt16
//c++:INT(int) ---- c#:System.Int16
//c++:INT(int) ---- c#:System.Int32
//c++:UINT(unsigned int) ---- c#:System.UInt16
//c++:UINT(unsigned int) ---- c#:System.UInt32
//c++:LONG(long) ---- c#:System.Int32
//c++:ULONG(unsigned long) ---- c#:System.UInt32
//c++:DWORD(unsigned long) ---- c#:System.UInt32
//c++:DECIMAL ---- c#:System.Decimal
//c++:BOOL(long) ---- c#:System.Boolean
//c++:CHAR(char) ---- c#:System.Char
//c++:LPSTR(char *) ---- c#:System.String
//c++:LPWSTR(wchar_t *) ---- c#:System.String
//c++:LPCSTR(const char *) ---- c#:System.String
//c++:LPCWSTR(const wchar_t *) ---- c#:System.String
//c++:PCAHR(char *) ---- c#:System.String
//c++:BSTR ---- c#:System.String
//c++:FLOAT(float) ---- c#:System.Single
//c++:DOUBLE(double) ---- c#:System.Double
//c++:VARIANT ---- c#:System.Object
//c++:PBYTE(byte *) ---- c#:System.Byte[]
//c++:BSTR ---- c#:StringBuilder
//c++:LPCTSTR ---- c#:StringBuilder
//c++:LPCTSTR ---- c#:string
//c++:LPTSTR ---- c#:[MarshalAs(UnmanagedType.LPTStr)] string
//c++:LPTSTR 輸出變量名 ---- c#:StringBuilder 輸出變量名
//c++:LPCWSTR ---- c#:IntPtr
//c++:BOOL ---- c#:bool
//c++:HMODULE ---- c#:IntPtr
//c++:HINSTANCE ---- c#:IntPtr
//c++:結(jié)構(gòu)體 ---- c#:public struct 結(jié)構(gòu)體{};
//c++:結(jié)構(gòu)體 **變量名 ---- c#:out 變量名
//C#中提前申明一個(gè)結(jié)構(gòu)體實(shí)例化后的變量名
//c++:結(jié)構(gòu)體 &變量名 ---- c#:ref 結(jié)構(gòu)體變量名
//c++:WORD ---- c#:ushort
//c++:DWORD ---- c#:uint
//c++:DWORD ---- c#:int
//c++:UCHAR ---- c#:int
//c++:UCHAR ---- c#:byte
//c++:UCHAR* ---- c#:string
//c++:UCHAR* ---- c#:IntPtr
//c++:GUID ---- c#:Guid
//c++:Handle ---- c#:IntPtr
//c++:HWND ---- c#:IntPtr
//c++:DWORD ---- c#:int
//c++:COLORREF ---- c#:uint
//c++:unsigned char ---- c#:byte
//c++:unsigned char * ---- c#:ref byte
//c++:unsigned char * ---- c#:[MarshalAs(UnmanagedType.LPArray)] byte[]
//c++:unsigned char * ---- c#:[MarshalAs(UnmanagedType.LPArray)] Intptr
//c++:unsigned char & ---- c#:ref byte
//c++:unsigned char 變量名 ---- c#:byte 變量名
//c++:unsigned short 變量名 ---- c#:ushort 變量名
//c++:unsigned int 變量名 ---- c#:uint 變量名
//c++:unsigned long 變量名 ---- c#:ulong 變量名
//c++:char 變量名 ---- c#:byte 變量名
//C++中一個(gè)字符用一個(gè)字節(jié)表示,C#中一個(gè)字符用兩個(gè)字節(jié)表示
//c++:char 數(shù)組名[數(shù)組大小] ---- c#:MarshalAs(UnmanagedType.ByValTStr, SizeConst = 數(shù)組大小)]
public string 數(shù)組名; ushort
//c++:char * ---- c#:string
//傳入?yún)?shù)
//c++:char * ---- c#:StringBuilder
//傳出參數(shù)
//c++:char *變量名 ---- c#:ref string 變量名
//c++:char *輸入變量名 ---- c#:string 輸入變量名
//c++:char *輸出變量名 ---- c#:[MarshalAs(UnmanagedType.LPStr)] StringBuilder 輸出變量名
//c++:char ** ---- c#:string
//c++:char **變量名 ---- c#:ref string 變量名
//c++:const char * ---- c#:string
//c++:char[] ---- c#:string
//c++:char 變量名[數(shù)組大小] ---- c#:[MarshalAs(UnmanagedType.ByValTStr,SizeConst=數(shù)組大小)] public string 變量名;
//c++:struct 結(jié)構(gòu)體名 *變量名 ---- c#:ref 結(jié)構(gòu)體名變量名
//c++:委托 變量名 ---- c#:委托變量名
//c++:int ---- c#:int
//c++:int ---- c#:ref int
//c++:int & ---- c#:ref int
//c++:int * ---- c#:ref int
//C#中調(diào)用前需定義int 變量名 = 0;
//c++:*int ---- c#:IntPtr
//c++:int32 PIPTR * ---- c#:int32[]
//c++:float PIPTR * ---- c#:float[]
//c++:double** 數(shù)組名 ---- c#:ref double 數(shù)組名
//c++:double*[] 數(shù)組名 ---- c#:ref double 數(shù)組名
//c++:long ---- c#:int
//c++:ulong ---- c#:int
//c++:UINT8 * ---- c#:ref byte
//C#中調(diào)用前需定義byte 變量名 = new byte();
//c++:handle ---- c#:IntPtr
//c++:hwnd ---- c#:IntPtr
//c++:void * ---- c#:IntPtr
//c++:void * user_obj_param ---- c#:IntPtr user_obj_param
//c++:void * 對(duì)象名稱 ---- c#:([MarshalAs(UnmanagedType.AsAny)]Object 對(duì)象名稱
//c++:char, INT8, SBYTE, CHAR ---- c#:System.SByte
//c++:short, short int, INT16, SHORT ---- c#:System.Int16
//c++:int, long, long int, INT32, LONG32, BOOL , INT ---- c#:System.Int32
//c++:__int64, INT64, LONGLONG ---- c#:System.Int64
//c++:unsigned char, UINT8, UCHAR , BYTE ---- c#:System.Byte
//c++:unsigned short, UINT16, USHORT, WORD, ATOM, WCHAR , __wchar_t ---- c#:System.UInt16
//c++:unsigned, unsigned int, UINT32, ULONG32, DWORD32, ULONG, DWORD, UINT ---- c#:System.UInt32
//c++:unsigned __int64, UINT64, DWORDLONG, ULONGLONG ---- c#:System.UInt64
//c++:float, FLOAT ---- c#:System.Single
//c++:double, long double, DOUBLE ---- c#:System.Double
//Win32 Types ---- CLR Type
//Struct需要在C#里重新定義一個(gè)Struct
//CallBack回調(diào)函數(shù)需要封裝在一個(gè)委托里,delegate static extern int FunCallBack(string str);
//unsigned char** ppImage替換成IntPtr ppImage
//int& nWidth替換成ref int nWidth
//int*, int&, 則都可用 ref int 對(duì)應(yīng)
//雙針指類型參數(shù),可以用 ref IntPtr
//函數(shù)指針使用c++: typedef double (*fun_type1)(double); 對(duì)應(yīng) c#:public delegate double fun_type1(double);
//char* 的操作c++: char*; 對(duì)應(yīng) c#:StringBuilder;
//c#中使用指針:在需要使用指針的地方 加 unsafe
//unsigned char對(duì)應(yīng)public byte
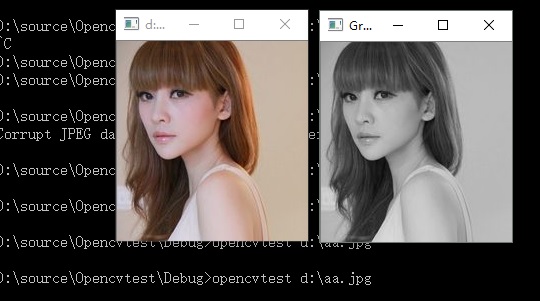
提示:學(xué)習(xí)這課之前,我們假設(shè)你已經(jīng)知道如何用imread載入圖像并用imshow顯示在窗口中。 如果還不知道那么先看
目標(biāo):
在這個(gè)教程中你將會(huì)學(xué)到:
1、使用
imread載入圖像
2、使用
cvtColor將圖像沖
BGR格式轉(zhuǎn)換為
Grayscale格式
3、使用
imwrite將轉(zhuǎn)換好的圖像保存到硬盤(pán)上
源碼: 1 #include <cv.h>
2 #include <highgui.h>
3
4 using namespace cv;
5
6 int main(int argc, char ** argv)
7 {
8 char* imageName = argv[1];
9 Mat image;
10 image = imread(imageName, 1);
11
12 if (2 != argc || !image.data)
13 {
14 printf("No image data\n");
15 return -1;
16 }
17
18 Mat gray_image;
19 cvtColor(image, gray_image, CV_BGR2GRAY);
20
21 imwrite("D:/images/Gray_Image.jpg", gray_image);
22
23 namedWindow(imageName, CV_WINDOW_AUTOSIZE);
24 namedWindow("Gray image", CV_WINDOW_AUTOSIZE);
25
26 imshow(imageName, image);
27 imshow("Gray image", gray_image);
28
29 waitKey(0);
30 return 0;
31 }
說(shuō)明:1、通過(guò)
imread載入一個(gè)
BGR圖像。
2、將圖像沖
BGR轉(zhuǎn)換成
Grayscale格式:
cvtColor( image, gray_image, CV_BGR2GRAY);cvtColor參數(shù):
a、源圖像(
image)b、目標(biāo)圖像(
gray_image),用于保存轉(zhuǎn)換好的圖像。
c、指定轉(zhuǎn)換類型。
3、保存圖像
imwrite("../../images/Gray_Image.jpg", gray_image);4、最后通過(guò)窗口顯示圖像,查看轉(zhuǎn)換效果。
namedWindow(imageName, CV_WINDOW_AUTOSIZE);
namedWindow("Gray image", CV_WINDOW_AUTOSIZE);
imshow(imageName, image);
imshow("Gray image", gray_image);
結(jié)果:
posted @
2016-07-12 07:40 canaan 閱讀(1141) |
評(píng)論 (0) |
編輯 收藏
目標(biāo)學(xué)習(xí):1、使用
imread載入圖像。
2、使用
namedWindow創(chuàng)建命名OpenCV窗口。
3、使用
imshow在OpenCV窗口中顯示圖像。
源碼:
1 #include <opencv2/core/core.hpp>
2 #include <opencv2/highgui/highgui.hpp>
3 #include <iostream>
4
5 using namespace cv;
6 using namespace std;
7
8 int main(int argc, char ** argv)
9 {
10 if (2 != argc)
11 {
12 cout << " Usage: display_image ImageToLoadAndDisplay" << endl;
13 return -1;
14 }
15
16 Mat image;
17 image = imread(argv[1], CV_LOAD_IMAGE_COLOR); // Read the file
18
19 if (!image.data) // Check for invalid input
20 {
21 cout << "Could not open or find the image" << std::endl;
22 return -1;
23 }
24
25 namedWindow("Display window", WINDOW_AUTOSIZE); // Create a window for display
26 imshow("Display window", image); // Show our image inside it.
27
28 waitKey(0); // wait for a keystroke in the window
29 return 0;
30 }
說(shuō)明:
在使用OpenCV 2 的功能之前,幾乎總是要包含
1、
core 部分,定義庫(kù)的基本構(gòu)建塊
2、
highgui模塊,包含輸入輸出操作函數(shù)。
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
還需要include<iostream>這樣更容易在console上輸出輸入。為了避免數(shù)據(jù)結(jié)構(gòu)和函數(shù)名稱與其他庫(kù)沖突,OpenCV有自己的命名空間
cv。當(dāng)然為了避免在每個(gè)關(guān)鍵字前都加cv::keyword,可以在頭部導(dǎo)入該命名空間。
using namespace cv;using namespace std;需要在命令行輸入有效的圖像名稱。
if (2 != argc)
{
cout << " Usage: display_image ImageToLoadAndDisplay" << endl;
return -1;
}然后創(chuàng)建
Mat對(duì)象用于存儲(chǔ)載入的圖像數(shù)據(jù)。
Mat image;調(diào)用
imread函數(shù)載入圖像(圖像名稱為
argv[1]指定的)。第二個(gè)參數(shù)指定圖像格式。
1、CV_LOAD_IMAGE_UNCHANGED (<0) loads the image as is(including the alpha channel if present)2、CV_LOAD_IMAGE_GRAYSCALE (0) loads the image as an intensity one3、CV_LOAD_IMAGE_COLOR (>0) loads the image in the BGR formatimage = imread(argv[1], CV_LOAD_IMAGE_COLOR); // Read the file
如果第二個(gè)參數(shù)未指定,那么默認(rèn)為CV_LOAD_IMAGE_COLOR為了檢查圖像是否正常載入,我們用
namedWindow函數(shù)創(chuàng)建一個(gè)OpenCV窗口來(lái)顯示圖像。需要指定窗口名稱和大小。
第二個(gè)參數(shù)默認(rèn)為:WINDOW_AUTOSIZE
1、
WINDOW_AUTOSIZE 只支持QT平臺(tái)。
2、
WINDOW_NORMAL QT上支持窗口調(diào)整大小。
最后在創(chuàng)建的窗口中顯示圖像
imshow("Display window", image);
結(jié)果
編譯執(zhí)行程序。
./DisplayImage d:\apple.jpg
中國(guó) 中華 偉大 民國(guó) 民族,
如何生成所有組合(例:中國(guó),中華民族,中華民國(guó),偉大中華,偉大中華民族) 。
注意:中華民國(guó),民國(guó)中華 算一個(gè)。
In the Internet address family, this structure is used by Windows Sockets to specify a local or remote endpoint address to which to connect a socket. This is the form of the sockaddr structure specific to the Internet address family and can be cast to sockaddr.
1 struct sockaddr_in
2 {
3 short sin_family; // (16位)地址家族(即指定地址格式),應(yīng)為AF_INET。internetwork: UDP, TCP, etc.
4 unsigned short sin_port; // (16位)端口號(hào)
5 struct in_addr sin_addr // (32位) IP地址
6 char sin_zero[8]; // (64位) 填充,使結(jié)構(gòu)體與SOCKADDR大小相同
7 }
8
9 總共為:128位(即16字節(jié))
需要頭文件:winsock2.h
posted @
2012-07-12 16:28 canaan 閱讀(1246) |
評(píng)論 (0) |
編輯 收藏